Un robot collaborativo, dotato di un end-effector specificatamente progettato e realizzato, è in grado di convogliare e avviare automaticamente raccordi istantanei su manifold di valvole pneumatiche.
L’avvitatura manuale di raccordi istantanei su manifold di valvole pneumatiche rappresenta un costo per le aziende, che non aggiunge valore al prodotto finale, sebbene all’operatore sia richiesta attenzione nel compiere movimenti precisi e ripetitivi, molto spesso alienanti e faticosi. La robotica collaborativa può essere impiegata per aiutare l’operatore in queste operazioni di assemblaggio, migliorandone l’efficienza.
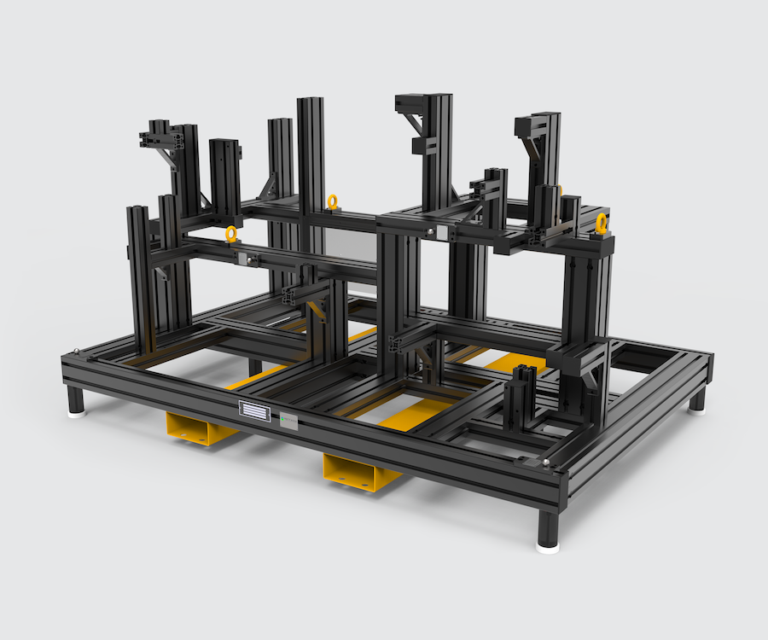
Nell’articolo è descritta l’applicazione studiata mediante un robot collaborativo Sawyer, della Rethink Robotics, dotato di un end-effector specificatamente progettato e realizzato, in grado di convogliare e avvitare automaticamente raccordi istantanei su manifold di valvole posizionate su un vassoio di carico girevole azionato pneumaticamente. Il progetto, la caratterizzazione sperimentale dell’end-effector e la stazione automatica vengono descritti nell’elaborato, come la validazione sperimentale della soluzione proposta.
Robotica avanzata
Per migliorare la flessibilità, l’affidabilità e l’efficienza delle moderne fabbriche intelligenti [1], tra le tendenze della quarta rivoluzione industriale, nota come Industria 4.0, si annovera la robotica avanzata [2], di cui fanno parte i robot collaborativi o cobot. Si tratta di robot antropomorfi che, rispetto ai robot industriali tradizionali, possono condividere lo spazio di lavoro con l’operatore umano; sono caratterizzati da basso payload e velocità di movimentazione ridotta; sono costituiti da link leggeri, che possono essere rivestiti da materiali cedevoli che evitano danni all’operatore in caso di urti accidentali; sono dotati di sensori e sono gestiti da algoritmi di controllo in grado di rilevare la presenza dell’operatore nelle vicinanze e, quindi, di arrestare il robot o di modificarne la traiettoria in tempi brevi, al fine di evitare urti pericolosi per l’operatore [3]. La condivisione del medesimo spazio di lavoro comporta che i cobot soddisfino ai requisiti di sicurezza definiti dalle normative vigenti [4] e non richiede l’utilizzo degli stessi in aree confinate, inaccessibili per l’uomo durante le condizioni di funzionamento, come è richiesto per i robot tradizionali. I cobot riescono pertanto ad avere una buona flessibilità operativa, che permette di adattarne l’uso a diversi contesti operativi anche con un riallestimento veloce, ma con una efficienza e una ripetibilità inferiori ad un robot tradizionale.
Nella collaborazione uomo-macchina in operazioni di assemblaggio l’introduzione del cobot consente, dopo un’analisi dettagliata del processo da trasformare, di assegnare delle sequenze operative al cobot, tipicamente operazioni ripetitive che non richiedano una elevata destrezza, mentre l’operatore è impegnato nelle altre sequenze operative del processo. In questo modo si riesce a migliorare l’efficienza del processo complessivo, che passa da completamente manuale a manuale, per alcune fasi, e automatico per altre. Questo approccio può avere però un interesse industriale solo quando si tratta di produzioni su piccoli lotti e magari con alcuni di questi che presentano piccole differenze tra loro. Infatti, per i piccoli lotti di produzione non è spesso sostenibile economicamente l’investimento in una stazione robotica tradizionale e, quindi, il processo di assemblaggio resterebbe manuale.
L’avvitatura è sicuramente un’operazione indicata per un robot collaborativo: essa richiede il riconoscimento del foro filettato, il posizionamento dell’elemento da processare, l’accoppiamento di quest’ultimo con una chiave e infine la fase di avvitatura stessa. L’insieme di queste azioni non apporta un valore aggiunto al prodotto finale, ma rappresenta chiaramente un costo e, se le azioni non sono effettuate correttamente, comporta uno scarto di produzione.
Per aumentare l’efficienza del processo è stato sviluppato un sistema per l’avvitatura di raccordi istantanei su un manifold per valvole pneumatiche, mediante l’utilizzo di un robot collaborativo, in una linea di assemblaggio che prevede il successivo montaggio manuale di quattro valvole. Il suo end-effector è dotato di un sistema di centraggio meccanico, per il corretto posizionamento del raccordo istantaneo da avvitare sul foro filettato, necessario considerando la bassa precisione di posizionamento dei cobot. Un avvitatore elettrico e un tubo per il convogliamento dei raccordi completano l’end-effector.
Il presente lavoro si articolerà attraverso la descrizione dell’applicazione specifica, dell’automazione dell’operazione di avvitatura, dell’end-effector e delle prove sperimentali di validazione del sistema proposto.