La movimentazione di carichi pesanti è una problematica cui la pneumatica è in grado di offrire soluzioni vincenti.
- Movimentazione e magazzino
- Movimentazione di carichi di massa importante
- Pneumatica per la movimentazione
- Conclusioni
La movimentazione ha l’obiettivo di rispondere all’esigenza della disponibilità di materiali e strumenti nel posto e al momento opportuni.
Le tipologie di movimentazione sono mirate al prodotto e al materiale da trasportare: ogni tipologia di oggetto richiede specifiche soluzioni.
I sistemi di movimentazione hanno valenze fondamentali nella gestione aziendale e impongono costi composti da diverse voci.
Una voce fondamentale di costo è relativa all’impianto vero e proprio, un’altra è dovuta all’esercizio.
Il settore industriale, in particolare quello manifatturiero dove meglio si esprime la capacità progettuale industriale, si sta evolvendo rapidamente con radicali trasformazioni.
Il mondo virtuale dell’Information Technology, il settore delle macchine industriali e l’universo della rete internet, parlando un linguaggio comune, vanno verso una crescente integrazione.
L’Industry 4.0 rappresenta un approccio di riferimento in ottica di evoluzione e di innovazione. Tuttavia, se è vero che i principi di riferimento della quarta rivoluzione sono stati espressi studiati e spiegati in una innumerevole serie di trattati e occasioni di dibattiti, la loro realizzazione rimane una sfida ardua.
La collaborazione tra operatori e macchine, velocità di scambio dati in tempo reale, l’Internet of Things (IoT), con cui ci si riferisce al processo di connessione alla rete Internet di oggetti fisici di utilizzo industriale, commerciale, domestico o quotidiano, l’intelligenza artificiale, la digitalizzazione e la flessibilità dei processi produttivi rappresentano concetti chiave che definiscono il cambiamento in atto.

Tutti questi concetti, per trasformarsi in realizzazioni e rappresentare uno strumento di lavoro per le aziende devono divenire organici e integrati per soluzioni realizzabili.
La movimentazione in ambito industriale, in senso esteso, implica il coinvolgimento di numerose operazioni integrate, comprendenti fasi complesse e stazioni di gestione di prodotti, risorse, semilavorati e magazzino.
Si tratta di strutture di imponenti dimensioni, dove vengono accolte grandi quantità di merce che, a fronte di una specifica richiesta, in un tempo previsto, spesso breve e garantito, devono essere individuate, movimentate e veicolate.
Movimentazione e magazzino
I servizi di movimentazione sono diversi e finalizzati al prodotto. Essi possono essere rispondenti a un’impostazione di gestione di base, se le finalità e le esigenze si limitano alla gestione di carico e scarico con stoccaggio semplice, oppure avere una gestione articolata e complessa che preveda un’articolata e completa strategia con opzioni di gestione di posizione, controllo dell’ambiente di stoccaggio per merci delicate, il tracciamento in tempo reale della posizione, l’assicurazione dell’integrità del prodotto e dei tempi e altre esigenze e prestazioni legate alla natura del prodotto, al livello del servizio e alle richieste del cliente, con le implicazioni di costi e impegno di risorse umane e strumentali conseguenti.
All’arrivo in magazzino si attiva un sistema di movimentazione e gestione che prevede lo svolgimento di una serie di operazioni spesso complesse e integrate.
Tra queste operazioni ci sono: la registrazione, la messa in sicurezza, la protezione dal deperimento, il posizionamento controllato e tracciato, la previsione di impegno di risorse, nello spazio e nel tempo, per la gestione del prodotto dalla presa in carico alla consegna finale.
I sistemi di movimentazione hanno il compito di collocare merci e prodotti in collocazioni opportune, precedentemente assegnate e gestite in funzione delle caratteristiche del prodotto, delle necessità di permanenze, dei tempi di magazzinaggio, delle necessità di gestione dell’uscita dalla gestione del magazzino per il prodotto ricevuto.

La collocazione e la movimentazione della merce nel magazzino rispondono a criteri di riferimento definiti (periodo di stoccaggio), l’appartenenza a determinate tipologie merceologiche (industria manifatturiera, chimica, sanitaria, farmaceutica, alimentare); le finalità del prodotto (scopi sociali, difesa militare, accoglienza turistica, emergenza sociale).
Il lavoro di movimentazione e la gestione nel suo complesso può essere anche molto articolato.
La movimentazione è vita pulsante di un impianto industriale. Nella movimentazione un ruolo centrale lo svolge il magazzino che vive grazie alla movimentazione ad esso dedicate.
La movimentazione dedicata alle merci nel magazzino riguarda diversi aspetti del transito delle merci dedicate a due grandi macrofasi di inizio e fine: il carico e lo scarico del magazzino.
I movimenti in entrata o carico del magazzino derivano da acquisti presso fornitori, da resi, da merce proveniente da altri magazzini della stessa azienda (quest’ultimo rappresenta un movimento interno).
I movimenti in uscita sono: vendite ai clienti, resi ai fornitori, merce destinata ad altri magazzini della stessa azienda (quest’ultimo rappresenta un movimento interno).
Le movimentazioni di magazzino sono seguite con tracciamento delle sole quantità e di quantità e valori.

I tracciamenti delle sole quantità sono gestiti dall’Ufficio Magazzino, dall’Ufficio Gestione Scorte e da tutti quegli uffici per cui è importante tracciare il movimento in termini di sola quantità.
Questo tipo di tracciamento è fondamentale e semplice facendo riferimento alle varie bolle di carico e scarico e a un registro di tenuta per il carico, lo scarico e la rimanenza.
Scopo delle scritture è di tenere sotto controllo il livello delle scorte e di provvedere all’approvvigionamento in tempo utile.
I tracciamenti riferiti a quantità e valori permettono di avere una integrazione tra la contabilità generale dell’azienda e quella di magazzino.
Le scritture di magazzino tenute a quantità e a valore permettono di realizzare più operazioni: realizzare un supporto amministrativo e contabile per le scelte gestionali dell’azienda; gestire le scorte; disporre di strumenti per il rispetto di regole e imposizioni legali; rispettare le imposizioni fiscali.
Grande attenzione è rivolta ai costi di gestione e realizzazione degli impianti.
Tra i costi di impianto ci sono i costi della struttura del magazzino, degli impianti di movimentazione dei materiali, degli impianti al servizio della movimentazione, delle strutture interne di immagazzinamento e di altri sistemi di ricovero per le unità di stoccaggio, i costi di hardware e software per la gestione.
Tra i costi di gestione si hanno i costi relativi alla strategia di gestione del magazzino e del sistema di produzione, i costi energetici per l’alimentazione dei mezzi di movimentazione e dei relativi servizi, i costi della manodopera per la gestione del sistema.
In una realtà industriale che si confronta con un mercato globalizzato e fortemente interconnesso si definiscono strategie industriali agili e innovative sia per stabilimenti e realtà avviate, sia per nuovi insediamenti industriali.

Nel caso di uno stabilimento avviato, si rivolgerà particolare attenzione all’adeguamento delle dotazioni aziendali.
Questa azione è vitale per il miglioramento dell’efficienza logistica, mirerà all’ottimizzazione di acquisto dei macchinari per la movimentazione e alla maggiore efficienza rivolta al sistema produttivo aziendale.
Per uno stabilimento impostato e progettato ex novo, invece, è fondamentale l’attenzione alla movimentazione che sarà protagonista dell’impostazione dell’architettura produttiva dell’intero impianto.
In questa fase, la pneumatica, con la sua flessibilità e adattabilità a esigenze specifiche e a requisiti generali, gioca un ruolo di grande valore aggiunto sia per l’impostazione progettuale di un insediamento nuovo, sia per l’adeguamento di impianti avviati.
La movimentazione interagisce costantemente col sistema magazzino e con i suoi flussi. Questi flussi sono le movimentazioni realizzate dalle unità di carico dell’impianto. Merci, prodotti e sistemi sono soggetti, di continuo, a flusso entrante e uscente.
Per gestione attiva si intende movimentazione, immagazzinamento, consolidamento; per gestione passiva si pensa a quella durante la quale si ha fermata e immagazzinamento statico in attesa di fase attiva. Un flusso di magazzino può avere diversi livelli di complessità: semplice, medio o complesso, ciascuno di questi tipi ha architettura e diagrammi di flusso diversi.
In figura 1 si vede lo schema dei tre tipi di flusso di magazzino.
Il grado di complessità del flusso del magazzino e della relativa movimentazione è funzione degli oggetti da movimentare, delle esigenze logistiche, della mole di merce gestita.
Nel caso di flusso semplice si movimentano le unità di carico senza una loro elaborazione, così come arrivate: le merci entrano nel magazzino, vengono immagazzinate, consolidate e rimesse in circolo.

Un flusso più articolato, definito come medio, prevede operazioni di “picking” semplice o articolate, utilizzando generalmente pallet completi soggetti a fasi di ricevimento, movimentazione a un magazzino generale da cui si ha uno smistamento direttamente alla spedizione o a una fase di consolidamento.
Per flusso complesso, infine, si intende quello realizzato da impianti con aree di movimentazione intermedie che impongono più interventi operativi e flussi complessi dotati di diramazioni.
La crescente complessità dei flussi è una necessità che porta con sé un maggior costo, che va a sommarsi al costo complessivo del processo elaborato nel magazzino: un maggiore frazionamento delle unità di carico porta costi maggiori.
Le fasi di “picking” sono quelle che costano di più: infatti oltre la metà del costo complessivo è rappresentato dal costo di queste fasi.
Movimentazione di carichi di massa importante
La movimentazione di carichi pesanti è una problematica cui la pneumatica è in grado di offrire soluzioni vincenti.
L’azienda finlandese Ab Solving Oy, rappresentata in Italia dalla Solving Italia Srl di Lesa (Novara), è una tra le aziende leader a livello mondiale nel campo della movimentazione di carichi di massa importante.
La gamma delle soluzioni proposte da Solving comprende sistemi basati sia su cuscini d’aria sia su ruote.

La tecnologia a cuscino d’aria permette di movimentare carichi su superfici planari e a rugosità controllata generando un sottile film d’aria su cui il carico viene sostenuto.
Il principio è illustrato schematicamente in figura 2.
Nella figura 2a si vede lo schema di funzionamento di un pattino piano ad aria per la movimentazione di carichi.
L’aria compressa fuoriesce e interagisce con la superficie del pavimento permettendo la generazione di un film d’aria che sostenta il carico ed evita il contatto diretto con il pavimento: in questo modo non si ha praticamente alcuna forza tangenziale di attrito tra carico e pavimento né consumo per usura e la movimentazione risulta agile, consentendo movimenti anche con curve strette e moto piroettante.
Il principio di funzionamento si rifà allo stesso principio dell’hovercraft rappresentato, come in figura 2b.
L’alimentazione (1) porta aria compressa alla linea (2) e alla linea (3). Sulla linea (2) si ha una resistenza regolabile e il flusso arriva ad alimentare l’ambiente delimitato da cuscino e pavimento, il serbatoio (4) assicura stabilità al valore di pressione e continuità alla portata, generando il flusso che provoca il film d’aria, tra il cuscino e il pavimento, di sostentamento del cuscino stesso con il piano di appoggio (5) del carico.
Sulla stessa linea (2) si ha il valore di pressione di riferimento per la regolazione del regolatore di pressione che alimenta il volume (6) che pressurizza il toro (7) del cuscino e ne impone la opportuna geometria.
Se il carico aumenta, il trafilamento, in prossimità del pavimento, diminuisce e la pressione aumenta, con conseguente ristabilimento dell’assetto.
In questo modo l’aria sostenta il carico ed evita il contatto con il pavimento: non si ha consumo per usura e la movimentazione è agile e consente movimenti anche con curve strette, traiettorie trasversali e moto piroettante.
I sistemi di movimentazione della Solving, a cuscini d’aria, sono progettati per la movimentazione di carichi anche molto pesanti, fino a un migliaio di tonnellate o più, e sono generalmente personalizzati per rispondere alle specifiche e alle esigenze richieste nelle diverse applicazioni.

Le navette a cuscino d’aria si applicano con successo in diversi settori industriali per il trasporto di carichi pesanti e voluminosi, come locomotive, grandi motori, veicoli, trasformatori, sezioni di velivoli o interi velivoli, bobine di carta e container.
Questi pianali personalizzati fanno galleggiare il carico sull’aria e sono un metodo flessibile di trasporto di carichi pesanti e ingombranti all’interno di capannoni, impianti o strutture con caratteristiche opportune di pavimentazione planare e orizzontale.
In figura 3 si vede l’intera navetta con la base su cui trova alloggiamento il carico.
Il carico è posto direttamente sulla navetta a cuscini d’aria oppure su un pallet portante sotto il quale si insinua la navetta.
La navetta e il carico flottano su un sottile film di aria.
Nella maggior parte dei casi la navetta è controllata da un telecomando e un solo operatore è in grado di condurre e supervisionare il trasporto dei carichi.
La pressione che rappresenta il carico distribuito sul pavimento è bassa e, comunque, ben definita, all’interno dei valori specificati per pavimenti di impianti industriali.
Infatti, il carico si distribuisce su un’area opportunamente estesa che è l’area dei cuscini d’aria della navetta; inoltre, non si crea attrito e l’usura del pavimento è quasi nulla.
Le navette Solving a cuscino d’aria sono una soluzione efficiente ed economica per carichi importanti se confrontate, per esempio, con le gru.

Altro vantaggio importante è rappresentato dal fatto che l’ingombro in altezza dei cuscini d’aria e lo spessore della navetta sono molto limitati e la massa dell’impianto è decisamente contenuta, rispetto a ingombro e massa dei carichi movimentabili.
Le navette Solving a cuscino d’aria sono in grado di essere personalizzate per rispondere a determinati requisiti e specifiche delle diverse applicazioni.
In figura 4, una navetta a cuscino d’aria offre una dimostrazione di movimentazione di un carico di duecento tonnellate.
Un solo operatore controlla la movimentazione del carico realizzata utilizzando una sola navetta a cuscino d’aria inserita al di sotto del pallet su cui si trova il carico.
Esempio notevole di movimentazione di grandi carichi è il sistema Solving di movimentazione di grandi fusoliere, rappresentato in figura 5.
Esso è costituito da due sistemi di sostentamento, cioè di tavole di sollevamento collegate, ciascuno è equipaggiato di sedici cuscini d’aria e di un’unità trainante pneumatica.
Il sistema è manovrato elettronicamente con un servomotore ed è sensorizzato.
Ogni navetta è dotata di una tavola di sollevamento e di dispositivi per il supporto delle fusoliere fino a 18 tonnellate di massa.
Il sistema di trasporto con le tavole di sollevamento a cuscini d’aria consente lo spostamento trasversale delle fusoliere tra la zona di lavorazione e assemblaggio della fusoliera stessa e l’area di montaggio dell’ala.
Inizialmente, le navette sono condotte indipendentemente l’una dall’altra verso l’area di assemblaggio della fusoliera e, all’arrivo, ogni navetta si ferma nella posizione stabilita per sollevare la fusoliera.
In seguito, la fusoliera viene condotta nell’area di assemblaggio dell’ala e qui lasciata.

Le navette, infine, vengono riportate nella zona iniziale di parcheggio. La comunicazione tra le navette è senza fili ed esse possono essere manovrate da un radiocomando portatile, per essere guidate dal personale addetto oppure, sono programmate per seguire un nastro di guida presente sul pavimento dello stabilimento.
Per realizzare correttamente la movimentazione delle fusoliere ed evitare danni alla struttura e ai sofisticati dispositivi di misurazione, le due tavole di sollevamento sono sincronizzate.
I cuscini d’aria sono divisi in due gruppi e ciascun gruppo può essere attivato separatamente per compensare eventuali dislivelli del pavimento.
In figura 6 si vede un sistema di movimentazione di grandi motori aeronautici durante le fasi di revisione e riparazione.
Nella figura si vede la navetta Solving a sostentamento a cuscini d’aria dotata di doppia trazione, sterzo motorizzato, regolazione continua della velocità e di un manubrio, manovrato da personale specializzato, in modo da garantire sempre la sicurezza.
Il sistema di controllo delle navette assicura un sollevamento uniforme e una regolazione automatica in funzione del variare dei carichi e delle condizioni del pavimento.
Pneumatica per la movimentazione
Per la movimentazione dei materiali e dei prodotti, gli impianti pneumatici utilizzano diverse tipologie di attuatori il cui moto è controllato da sistemi meccanici e meccatronici.
Tra gli attuatori maggiormente diffusi ci sono gli attuatori pneumatici lineari, o cilindri pneumatici, che rappresentano un esempio semplice, economico ed efficiente di attuatori.

Essi sono classificati come attuatori o motori e sono in grado di trasformare in energia meccanica un’altra forma di energia, nella fattispecie l’energia potenziale di un fluido in pressione.
Un cilindro pneumatico a doppio effetto utilizza l’aria compressa per muovere, in entrambi i versi, uno stantuffo collegato a uno stelo.
Invece, un cilindro a semplice effetto utilizza aria compressa per il movimento unidirezionale e un elemento elastico di ritorno per il verso opposto.
I cilindri sono dotati di numerosi accessori, come sensori per rilevare la posizione dello stantuffo, accessori di montaggio per il cilindro o aggiungere componenti all’estremità dello stelo.
Un’ampia gamma di industrie, che richiedono il movimento lineare, utilizza cilindri pneumatici poiché sono semplici da usare e rappresentano una soluzione economicamente vantaggiosa.
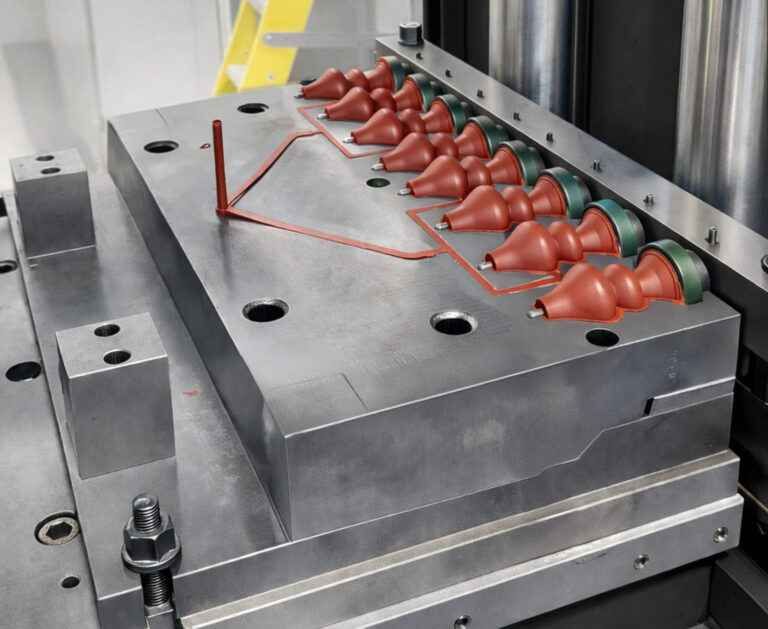
In figura 7 si vede una fotografia di un attuatore lineare pneumatico a doppio effetto utilizzato in impianti di movimentazione, una sezione e uno spaccato.
I cilindri offrono la possibilità di diverse e varie realizzazioni, a seconda dell’opportunità relativa alle necessità di movimentazione. Interessanti, in questo senso, sono i cilindri senza asta.
Questi sono attuatori di tipo lineare, costituiti da un cilindro in cui lo stantuffo è direttamente collegato al carico e compie il lavoro meccanico senza bisogno dell’interposizione dell’asta in modo da disporre di corse lunghe quanto l’ingombro dell’attuatore.
La figura 8a, b e c raggruppa una fotografia, una sezione e uno spaccato di un cilindro pneumatico senza stelo.
Il cilindro è prodotto dalla azienda Omas di Alpignano (Torino).
La slitta è collegata direttamente allo stantuffo, dove agisce l’aria compressa per la movimentazione, con un pilone di collegamento che passa attraverso una feritoia ricavata lungo la camicia del cilindro.

Un sistema di lamine affilate, che realizzano tenuta metallo su metallo, assicura che l’aria compressa non fuoriesca dalle camere anteriore e posteriore del cilindro stesso durante il funzionamento.
Questo sistema di tenuta è costoso e delicato e può essere soggetto, nel tempo, a perdita di efficienza.
Al fine di ottenere una corsa pari all’ingombro assiale del cilindro, senza ricorrere al sistema di tenuta descritto, esistono altre soluzioni come l’accoppiamento magnetico tra stantuffo e slitta come si vede in figura 8d.
In questo ultima soluzione, a bordo di slitta e stantuffo si montano magneti permanenti affacciati, che realizzano accoppiamento magnetico tra stantuffo motore e slitta condotta a cui è collegato il carico.
Altra soluzione interessante di cilindro senza stelo è rappresentata schematicamente in figura 8e, dove lo stantuffo è collegato alla slitta tramite una fune flessibile che forma un anello chiuso e che passa attraverso le testate, dove una tenuta tradizionale assicura che l’aria compressa possa agire efficacemente sullo stantuffo senza perdite dalle camere del cilindro.
La famiglia di moduli lineari cartesiani prodotti dalla Omas si contraddistingue per le elevate doti dinamiche e la compattezza degli ingombri, che rendono questi sistemi particolarmente indicati per essere utilizzati in applicazioni di pick & place, manipolazione, posizionamento, carico e scarico da macchine CNC; come sistemi lineari, macchine automatiche, scaricatori, macchine di verniciatura, asservimento presse, isole robotizzate.
I moduli lineari, come quelli utilizzati per realizzare i manipolatori rappresentati in figura 9, si distinguono per alte prestazioni dinamiche, per la compattezza degli ingombri e per una notevole versatilità di impiego.
Questi moduli sono prodotti utilizzando profili estrusi di alluminio autoportante che comprendono diverse tipologie di guide e sono utili in applicazioni di traslazione, asservimento e posizionamento del carico.
La movimentazione di carichi e prodotti si avvale della pallettizzazione robotizzata, grazie ai progressi del software e dei sistemi di visione.
Questa applicazione rappresenta una procedura in grado di realizzare con efficacia le fasi dei processi produttivi.
Il vantaggio della pallettizzazione si manifesta in misura maggiore nelle applicazioni dove sia necessario movimentare carichi pesanti con un sistema completamente automatizzato.
In figura 10 si vede un robot cartesiano xyz Gantry per una pallettizzazione efficiente prodotto dalla Omas.
I sistemi di movimentazione robotizzati sono dotati di organi di presa, spesso progettati appositamente per i carichi da movimentare.

Nella figura 11 si vedono tipici esempi di organi di presa intercambiabili per i sistemi robotizzati di movimentazione della ditta Omas.
In figura 11a, una mano di presa costituita da due sottomani ciascuna dotata di griffe poste a 120 gradi autocentranti; in figura 11b si ha una mano di presa dotata anch’essa di griffe a 120 gradi per la presa sicura di fusti e secchi; in figura 11c si ha una mano di presa a ventosa con vuoto, per la presa di oggetti di diversa dimensione, caratteristiche, superfici e delicati; in figura 11d l’organo di presa è adatto alla presa di sacchi e contenitori deformabili; la mano di presa di figura 11e è studiata per la presa di scatole e imballaggi.
In figura 12 si ha una particolare applicazione di movimentazione: la pallettizzazione robotizzata di sacchi.
Questa particolare tipologia di movimentazione, rispetto alla classica pallettizzazione di scatole, ha delle peculiarità legate all’oggetto da movimentare.
Spesso si sottolineano i vantaggi della movimentazione di sacchi rispetto a quella di scatole, in particolare, i sacchi, per la loro geometria, richiedono un minore numero di schemi di pallettizzazione, spesso sono più robusti delle scatole soffrendo meno la deformazione e i danni da eventuali collisioni.
Infine, il robot, in fase di deposito, può evitare le traiettorie di avvicinamento e di accostamento tipiche della movimentazione e pallettizzazione delle scatole, eseguendo il deposito del sacco in appoggio.
Conclusioni
Il settore della movimentazione di carichi e prodotti risulta fondamentale per l’industria manifatturiera e non solo. In tale settore, l’impiego della pneumatica si dimostra molto efficace, anche in presenza di esigenze particolari.
di Andrea Manuello Bertetto*, Dipartimento di Ingegneria Meccanica e Aerospaziale, Politecnico di Torino
*L’autore desidera ringraziare le aziende che hanno consentito l’accesso a informazioni e immagini per la stesura di questo lavoro. In particolare, si ringrazia l’azienda Ab Solving Oy – Solving Italia Srl di Lesa (Novara) e l’azienda OMAS Srl di Alpignano (Torino).