Un jackup è una piattaforma off-shore in grado di grado di sollevare il proprio scafo al di sopra del pelo dell’acqua. La sua emersione è gestita da un meccanismo pignone-cremagliera. Al fine di aumentarne la vita, è stato proposto l’utilizzo di un profilo ad archi di cerchio in alternativa all’evolvente classico. Nello studio che segue, realizzato dal Politecnico di Milano, sono state studiate le conseguenze di questa sostituzione tramite una procedura TCA dedicata.
Un jackup (o piattaforma autosollevante) è una piattaforma off-shore che, grazie alla sua capacità di abbassare le sue gambe, è in grado di sollevare il suo scafo al di sopra del pelo dell’acqua. Il termine lifboats (o barca autosollevante) si riferisce invece a delle imbarcazioni molto simili, l’unica differenza è che esse sono delle barche, ovvero presentano un sistema di propulsione.
Sia nella versione “piattaforma“ sia nella versione “nave”, il movimento delle gambe e la conseguente emersione sono tipicamente governate da un sistema tipo pignone-cremagliera. Un terzo componente mantiene lo scafo in posizione sulle gambe. Questo schema funzionamento è riportato in figura 1, con un’attenzione particolare al sistema di sollevamento tramite cremagliera. I lettori interessanti sono rimandati a [1] – [3], dove vengono discussi più nel dettaglio queste tipologie di piattaforme/navi.
Una metodologia progettuale delle cremagliere di sollevamento è stata proposta da Honda, H. in [4] – [9], dove, dopo aver definito i carichi tipici, viene proposta una verifica basata su prove sperimentali e metodi analitici/numerici. La stima dei carichi è anche discussa da Gupta, S. [10]. Trattandosi comunque di una trasmissione meccanica ad ingranaggi, è sempre possibile analizzare il sistema completo cremagliera e pignone adottando i classici codici di calcolo proposto dagli standard (ad esempio, la serie ISO 6336 e le metodologie ANSI AGMA) o tramite approcci basati sulla modellazione numerica in ambiente FEM [11] – [12]. Invece, per quanto riguarda le proprietà resistenziali dei materiali tipicamente adottati, il progettista di questa tipologia di componenti può fare affidamento sul lavoro di Montestruc, A.N. [13].
Profili Multi Radiali per ridurre la pressione di contatto
Lo stato dell’arte di questa tipologia di componenti al momento è rappresentato da una cremagliera a denti dritti che ingrana con un pignone con un basso numero di denti (tipicamente 7/8) [12], [14]–[16]. Sfortunatamente, il fatto che il pignone abbia un basso numero di denti implica una pressione di contatto elevata. Infatti, nell’evolvente, il raggio di contatto ρy diminuisce avvicinandosi al diametro di base db dove ρy = 0.
Nelle ruote dentate con un numero di denti maggiore, questo aspetto è mitigato dal loro maggior fattore di ricoprimento e dagli aspetti di ripartizione del carico. Tuttavia, quando la ruota ha un numero di denti molto basse, il fattore di ricoprimento è praticamente unitario, e, conseguentemente, solo una coppia di denti è in contatto per la maggior parte del tempo. In questi casi, la ripartizione del carico tra le coppie in presa non mitiga la pressione di contatto nelle regioni vicine al diametro di base.
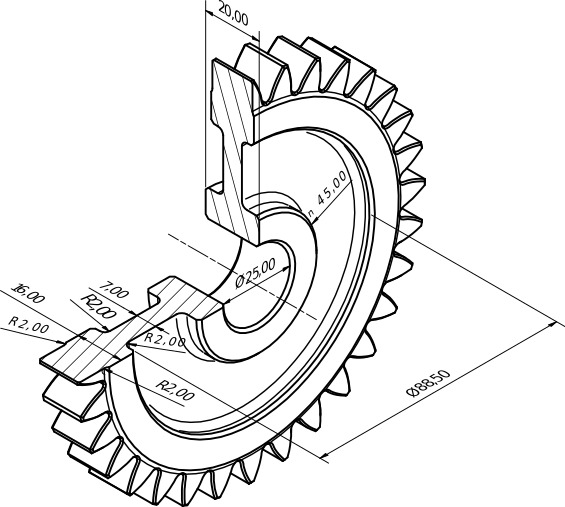
Recentemente, al fine di ridurre la pressione di contatto, Nowoisky, A. [16] ha proposto la sostituzione del classico profilo ad evolvente del fianco del dente con un profilo Multi Radiale (MR), aumentando così il raggio di contatto nella zona vicino al diametro di base. Nowoisky, A. [16] ha inoltre fornito una ottimizzazione della macrogeometria della ruota dentata (numero di denti, coefficiente di spostamento, etc.). La figura 2 mostra il profilo MR adottato come riferimento in questo articolo. mn è il modulo normale della ruota dentata a denti dritti il cui profilo ad evolvente è stato sostituito dal profilo MR. Gli autori di questo articoli sono a conoscenza di almeno 3 applicazioni che lavorano grazie a questa tipologia di profili.

Purtroppo, se la classica teoria dell’evolvente [17]-[19], insieme agli standard classici (ISO 6336 serie e ANSI/AGMA ones), può essere usata per verificare analiticamente un sistema cremagliera e pignone a evolvente, lo stesso non può essere fatto per il caso MR.
L’analisi di questa categoria di componenti può essere fatta tramite metodologia generiche come il FEM; ovvero effettuando la verifica tramite una analisi del contatto sotto carico (Loaded Tooth Contact Analysis – LTCA), dove anche la deformabilità del componente è presa in esame. Nonostante sia necessaria per un’analisi appropriata del sistema, una analisi LTCA richiede tempo. Questo aspetto è ancora più importante se si utilizza la LTCA anche nelle prime fasi progettuali.
Quindi, in questo articolo viene presentata una metodologia analitica per l’analisi del contatto (Tooth Contact Analysis – TCA) per l’iniziale valutazione di possibili profili MR. Tale procedura di TCA permette la valutazione delle grandezze tipiche dell’ingranamento così come, grazie al concetto di curve Errore di Trasmissione (EdT) accoppiate, di valutare la correttezza dell’ingranamento di pignone MR e cremagliera.
Per fare ciò, occorre introdurre i concetti di Edt e di Funzione di Trasmissione (FdT) al fine di poter descrivere la cinematica dell’ingranamento. Successivamente, partendo dalla posizione del punto di contatto, vengono calcolate le grandezze tipiche dell’ingranamento (forze, velocità e pressione).
Le equazioni dell’ingranamento di due ingranaggi a evolvente vengono introdotte al fine di descrivere brevemente le loro grandezze tipiche; successivamente vengono derivate le equazioni per il caso di cremagliera e pignone ad evolvente. Tali grandezze servono, da un lato, per confrontare la soluzione MR con la soluzione ad evolvente e, dall’altro, per la validazione della TCA.
Infatti, la procedura di TCA discussa qui è stata validata effettuandola su di un caso di riferimento, la cui soluzione analitica è nota. Tale caso è il caso dell’evolvente che, può essere visto come un pignone MR con un numero infinito di raggi di cerchio. La validazione della TCA è stata effettuata paragonando così i suoi risultati con il corrispettivo teorico.
Definizione della funzione di trasmissione FdT
e dell’errore di trasmissione EdT
La FdT può essere vista come il legame che intercorre tra la rotazione del pignone e la rotazione/traslazione della ruota/cremagliera [20]. Nel caso di una coppia di ingranaggi ad evolvente ideali (ovvero senza errori di fabbricazione e indeformabili), la FdT è lineare. Nel caso MR ideale, invece, la FdT non è più lineare.
In questo articolo, l’EdT è considerato come la differenza tra la posizione effettiva della cremagliera e la posizione a cui si sarebbe trovata la cremagliera se il pignone fosse ad evolvente. In altre parole. L’EdT è la differenza tra la FdT effettiva e quella ideale. Nel caso di profili ideali ad evolvente, l’EdT è nullo. Per via delle sue intrinseche caratteristiche geometriche, il profilo MR ideale presenta un EdT non nullo. Come verrà discusso nelle prossime sezioni, l’EdT presenta delle caratteristiche peculiari, permettendo così la sua manipolazione al fine di definire la cinematica dell’ingranamento.
Il calcolo dell’Edt richiede prima la definizione della Fdt. Qui, al fine di calcolare la FdT del caso MR, è stato sviluppato un approccio basato sulla determinazione del contatto calcolando, per ogni rotazione del pignone MR, il punto che ha la stessa normale/tangente del fianco della cremagliera. Una volta determinato il punto, si definisce di conseguenza la posizione della cremagliera.

In altre parole, per ogni punto appartenente al profilo attivo del dente, la rotazione della ruota è definita come la rotazione richiesta da un punto appartenente al fianco del dente del pignone per poter avere, nella configurazione ruotata, la stessa normale del fianco della cremagliera. Successivamente, partendo dal punto ruotato, la FdT e il conseguente EdT vengono determinati definendo il punto del fianco del pignone come se appartenesse al fianco della cremagliera. La posizione del punto di contatto sarà utilizzata successivamente per determinare le grandezze nel caso del pignone MR.
La figura 3 mostra un paragone tra la cinematica del pignone ad evolvente e il caso MR. Nella parte superiore viene mostrato l’ingranamento tra il pignone e la cremagliera, evidenziando alcune posizioni di pignone e cremagliera ed il loro punto di contatto; entrami i casi sono stati ottenuti utilizzando la procedura di calcolo sviluppato per il caso MR. Si nota come i punti di contatto del caso a evolvente si trovino su una linea (la retta di azione) mentre lo stesso non si può dire per i punti di contatto del caso MR. Nella parte inferiore della figura, sempre per entrambi i casi, vengono invece mostrate le posizione di contatto iniziali e finali così come la collocazione dei punti di contatto. Trascurando il contatto di testa (ovvero la linea tratteggiata), i punti di contatto del MR e dell’evolvente sono vicini tra di loro; tuttavia, i punti del caso MR oscillano intorno ai punti di contatto dell’evolvente. Questa oscillazione implica il pignone MR abbia un EdT non nullo.

La figura 4 mostra invece sia la FdT che l’EdT per i due casi, calcolati adottando la procedura di calcolo descritta sopra. L’EdT calcolato per l’evolvente è nullo, verificando la procedura di calcolo di cui sopra. Tuttavia, essendo il profilo MR una approssimazione dell’evolvente teorico, il suo EdT non è nullo, risultando in una trasmissione di moto disuniforme. Il dente posizionato verticalmente è stato scelto come posizione 0 della rotazione (vedi figura 2); le rotazioni sono state considerate positive se orarie. EdT viene considerato nullo nella posizione di contatto iniziale.
Uso delle curve EdT accoppiate per descrivere la cinematica di pignone e cremagliera
Siccome l’EdT del caso MR ideale non è nullo occorre verificare che, anche nel caso di pignone indeformabile, il suo movimento avvenga senza impatti (ovvero, contatto improvviso di superfici con normali differenti) e se il rapporto di ricoprimento sia maggiore di uno. Tutto questo viene fatto adottando l’idea di curve EdT accoppiate. Infatti, accoppiando la curva EdT di una coppia di denti con quella delle coppie adiacenti, spaziante a ± 2π/z è possibile valutare l’uniformità della trasmissione del moto [20]-[25] Poche semplici regole permettono di fare ciò:
- La coppia di denti che è sta ingranando è quella con la EdT maggiore [20],[21],[24],[26].
- Quando due curve non si intersecano tra di loro, ovvero sono presenti delle discontinuità nella transizione da una coppia alla successiva, l’ingranamento presenta degli impatti [20] (vedi figura 5). Similmente, intersezione tra le curvi implicano una transizione da una coppia di dente all’altra senza problematiche [20] (vedi figura 6).
- Quando le curve non si sovrappongono, il rapporto di ricoprimento è minore di uno. Pertanto, ci saranno discontinuità nella trasmissione del moto.
Le figure 5 e 6 possono essere utilizzate per applicare i concetti di cui sopra nel caso di MR preso in esame in questo articolo; il focus è sulla curva rossa, leggendo l’ingranamento da sinistra verso destra.

Al fine di poter valutare correttamente le curve occorre dividere l’ingranamento di una coppia in due fasi: la fase di ingresso e la fase di uscita. La prima è quando la coppia inizia l’ingranamento (ovvero i punti da 1 a 3 in figura 5 e da 1 a 2 in figura 6); mentre la seconda è quando la coppia sta uscendo dall’ingranamento (ovvero i punti da 4 a 6 in figura 5 e da 3 a 4 in figura 6). Quando la coppia z è nella fase di ingresso, la coppia z – 1 è in uscita. Similmente, quando la coppia z è in uscita, la coppia z + 1 è in ingresso.

Possiamo quindi adottare quanto discusso precedentemente al caso di figura 5, ovvero al caso in cui sono presenti impatti:
- Punto 1. È la posizione di primo contatto di z. Qui, la coppia è nella fase di ingresso, mentre z – 1 è in uscita. Dato che z ha un EdT più alto, z sarà in presa fino al punto 2. Qui, la transizione con z – 1, ovvero con la coppia in uscita, avviene bruscamente (non le curve non si intersecano), implicando un impatto.
- Punto 2. Ora è la coppia z – 1 ad avere il maggior EdT; pertanto, sarà lei ad essere in presa fino al punto 3. Siccome è presente una intersezione tra le curve EdT, la transizione tra una coppia e l’altra avviene senza impatti.
- Punto 3. La coppia z ha di nuovo l’EdT più alto, e rimarrà in presa fino al punto 4. Anche in questo punto, così come nel punto 2, la transizione avviene senza impatti.
- Punto 4. Qui, la coppia successiva z + 1 entra nella sua fase di ingresso, mentre inizia la sua fase di uscita. Da questo punto fino al punto 5, sarà z + 1 ad essere in presa. Per la coppia z + 1, questo punto è l’equivalente del punto 1. Similmente al punto 1, anche qui è presente un impatto.
- Punto 5. ritorna ad essere in presa mentre z + 1 non sarà più in presa fino al punto 6. Per la coppia z + 1, questo punto è l’equivalente del punto 2. Similmente al punto 2, la transizione tra avviene senza impatti.
- Punto 6. Finalmente, z esce dall’ingranamento. La transizione da z a z + 1 avviene senza impatti. Per la coppia z + 1, questo punto è l’equivalente del punto 3.
Invece, nel caso di figura 5 ovvero al caso in cui non sono presenti impatti:
- Punto 1. È la posizione di primo contatto di z. Qui, siccome z – 1 ha un EdT maggiore rispetto a z, z non sarà in presa fino al punto 2.
- Punto 2. È ora z ad essere la coppia con il maggior EdT; pertanto, z è in presa e lo rimarrà fino al punto 3. Qui, vista la presenza di una intersezione tra le curve EdT, la transizione tra le due coppie avviene senza impatti.
- Punto 3. È la posizione di primo contatto di z + 1. In ogni caso, siccome z ha un EdT maggiore rispetto a z + 1, z resterà in presa fino al punto 4. Per la coppia z + 1, questo punto è l’equivalente del punto 1.
- Punto 4. È ora z + 1 ad avere il maggior EdT. La coppia in uscita z lascia l’ingranamento e la coppia in ingresso z + 1 inizia ad essere in presa. Per la coppia z + 1, questo punto è l’equivalente del punto 2.

Fig. 7 – Effetto dei diversi raggi all’interno della curva EdT

La distinzione tra fase di ingresso e fase di uscita permette di capire l’effetto di ciascun raggio facente parte del profilo MR. Questo è mostrato in figura 7, dove viene evidenziata la porzione di EdT di cui ciascun raggio è responsabile; il focus è sulla curva centrale, la quale è definita da una linea continua. Nella fase di ingresso, r1 interagisce sia con r3 che con il raccordo di testa appartenente al dente della coppia precedente z – 1. Similmente, nella fase di uscita, r3 e r4 si interfacciano con della coppia successiva z + 1, ora in ingresso. Pertanto, le caratteristiche del movimento, ovvero la presenza o meno di impatti, risultano essere definiti solo da come r1 si relaziona con r3 ed r4. Viceversa, r2 non gioca nessun ruolo per quanto riguarda le caratteristiche del moto ma, come può essere visto grazie al risultato della analisi di sensitività, riportata più avanti in tabella 2 riveste un ruolo nella bontà della trasmissione del moto.
Forze e velocità durante l’ingranamento di ruote ad evolvente
Al fine di poter definire, analiticamente, le velocità e le forze che caratterizzano l’ingranamento del pignone MR con la cremagliera, il primo passo è quello di introdurre la cinematica del caso “classico”, ovvero del caso di due ruote ad evolvente che ingranano. Successivamente, questi concetti vengono estesi al caso del pignone ad evolvete e cremagliera e, da questo, derivare le equazioni del caso MR

La figura 8 descrive le forze che un pignone ad evolvente trasmette a una ruota, anch’essa ad evolvente, quando l’ingranamento avviene in un generico punto y. In questo caso, la forza normale Fn è sempre diretta lungo la retta di azione, la quale, per definizione, è sempre tangente ai due cerchi di base (db,1 e db,2) e normale ai fianchi nella posizione y. Questa forza normale è la forza che viene effettivamente scambiata tra di due denti. È inoltre possibile dividere Fn in due componenti: Ft,y tangente al diametro dy, ed Fr,y disposta radialmente.
Essendo Fn sempre tangente al diametro di base, è possibile calcolarla come [17] – [19]:
Fn = T / (db/2) (1)
dove db è il diametro di base e T la coppia applicata. Durante la rotazione, visto che Fn è sempre tangente al diametro di base, Fn è constante. Viceversa, il valore e la direzione di Ft,y ed r,yn è dipendono da αy ovvero dall’angolo di pressione in y (chiamato anche angolo di rotolamento); αy è così definito:
![]()
Dove α è l’angolo di pressione al diametro di riferimento d, ovvero il diametro primitivo. Ft,y ed Ftry possono essere definite grazie a αy. Per motivi di brevità, non essendo rilevanti per lo scopo di questo articolo, il loro calcolo non viene qui riportato.
| Tab. 1 – Nomenclatura di Fig. 9 | |
| v1 | Velocità del punto di contatto y quando questo appartiene al fianco del pignone |
| v2 | Velocità del punto di contatto y quando questo appartiene al fianco della ruota (o della cremagliera= |
| vn | Componente di velocità lungo la retta d’azione |
| vρ,1 | Componente di velocità del pignone perpendicolare alla retta d’azione, ovvero tangente al fianco del pignone |
| vρ,2 | Componente di velocità della ruota (o della cremagliera) perpendicolare alla retta d’azione, ovvero tangente al fianco della ruota (o della cremagliera) |
| vs | Velocità di strisciamento tra i due fianchi |
La figura 9 mostra le velocità al punto di contatto durante l’ingranamento; la loro nomenclatura è riportata in tabella 1. Per entrambi le ruote, è possibile calcolare la velocità nel punto di contatto come:

v1,y e v2,y possono essere a loro separate in due componenti: una normale e una tangenziale alla superficie del fianco nel punto di contatto.

La prima, vn è la componente di v1 e di v2 lungo la retta di azione (da cui la perpendicolarità rispetto al fianco). Per evitare compenetrazioni e/o distaccamenti tra le superfici, vn deve essere uguale per entrambi i profili. Questa uguaglianza può essere adottata al fine di legare le velocità di pignone e ruota e, quindi, definire il rapporto di trasmissione, che idealmente è constante. vn risulta essere così calcolata:

La seconda componente, ovvero la componente tangenziale, è definita come la proiezione di v1 e/o v2 lungo la tangente al punto di contatto (perpendicolare alla retta di azione). Tali velocità, ovvero vρ,1 e vρ,2 sono le velocità di rotolamento dei due profili. Nel punto di contatto y tali velocità sono definite come di seguito:
Note le velocità di rotolamento, è possibile calcolare infine la velocità di strisciamento come la loro differenza:
![]()
Più precisamente, si parla di velocità di strisciamento osservata dal pignone (vs1) e dalla ruota vs2):
Forze e velocità durante l’ingranamento di un pignone ad evolvente e cremagliera
Descrivendo la cinematica dell’ingranamento, i tipici libri sulla teoria degli ingranaggi si limitano al caso di ruote ingrananti, senza presentare il caso di pignone e cremagliera [17], [19], [17] – [27]. È comunque possibile derivare forze e velocità agenti nel punto di contatto di una cremagliera se si considera la cremagliera come una ruota con infiniti denti.

La figura 10 mostra le agenti sul fianco di un pignone ingranante con una cremagliera. Anche in questo caso, Fn risulta essere sempre diretta lungo la linea di azione, la quale è tangente al cerchio di base. È quindi ancora possibile calcolare Fn ricorrendo alla Eq.(1).
Similmente, la figura 11 mostra le velocità nel punto di contatto durante l’ingranamento di un pignone ad evolvente con una cremagliera. Questo caso è leggermente diverso da quello precedente. Infatti, per la cremagliera, non è logico definire ω2 e/o ry,2.

È comunque possibile affermare che, per ogni y-esimo punto di contatto, è sempre diretta nella stessa direzione. Infatti, grazie ai suoi vincoli, la cremagliera effettua solo un movimento di traslazione. Inoltre, grazie alle proprietà geometriche della cremagliera, che sono constanti, è possibile definire una relazione tra v2, vn e vρ,2.

Al fine di calcolare v2, basta prendere in considerazione che, anche in questo caso, per poter evitare compenetrazioni/distacchi, vn deve essere uguale per entrambi i profili: È interessante notare come v2 sia costante, implicando così un movimento uniforme della cremagliera. È quindi possibile calcolare la velocità di strisciamento come:
È interessante notare come v2 sia costante, implicando così un movimento uniforme della cremagliera. È quindi possibile calcolare la velocità di strisciamento come:
![]()
Forze e velocità durante l’ingranamento di un pignone multiradiale e cremagliera
Nonostante si possano ancora adottare i concetti precedente esposti, questo non significa che le equazioni descritte sopra, valide per il caso ad evolvente, possano essere applicate al caso del pignone MR. È comunque possibile ricavare le grandezze tipiche andandole a riferire al punto di contatto ed applicando delle basiche relazioni trigonometriche.

La figura 12 mostra le forze scambiate tra un pignone MR e la cremagliera. Anche in questo caso, Fn sarà sempre normale ad entrambi i fianchi. Dato che la cremagliera ha sempre la stessa inclinazione, l’inclinazione di Fn non cambierà, ma cambierà il suo punto di applicazione.
può essere separata in due forze Fx ed Fy definite nelle direzioni x/y. Queste due direzioni corrispondono alla direzione radiale (x) e tangenziale (y) se la cremagliera fosse considerata come una ruota con un infinito numero di denti. Tramite trigonometria è possibile definire Fx ed Fy; successivamente, considerando l’equilibrio del momento torcente e sviluppandolo la conseguente equazione, si è in grado di calcolare Fx ed Fn,y ovvero la forza normale scambiata dai due profili in y:
![]()
Un simile approccio può essere utilizzato per calcolare la componente radiale e tangenziale delle forze.

La figura 13 mostra le velocità nel punto di contato nel caso di un pignone MR che ingrana con una cremagliera. Come nel caso dell’evolvente (vedi figura 11) è possibile identificare la velocità del punto di contatto di contatto quando questo appartiene alla cremagliera (ovvero la velocità di traslazione v2), la velocità del punto di contato quando questo appartiene al fianco del pignone (ovvero v1), così come le componenti tangenziali (vρ,1 e vρ,2) normali (vn) e di strisciamento (vs). Come accaduto per le forze, non è possibile definire le velocità usando riarrangiando le equazioni dell’evolvente ma adottando semplici relazioni trigonometriche.

Al fine di evitare compenetrazioni/distacchi, vn deve essere uguale per entrambi i profili. È quindi possibile definire le equazioni per le componenti di velocità della cremagliera:

Da cui la velocità di strisciamento:

Determinazione della pressione di contatto

Come mostrato in figura 14, nel caso classico dell’evolvente, il raggio di contatto può essere calcolato grazie alle proprietà dell’evolvente, ovvero il raggio di contatto corrisponde al raggio di curvatura dell’evolvente.
Partendo da tali raggi di contatto, che definiscono i cilindri di contatto, la pressione di contatta viene calcolata ricorrendo alla teoria Hertziana del contatto:

Dove q è il carico distribuito, definito come Fn/b mentre E*1 e E*2 sono definiti come:
E*i = Ei / (1 – v2i) (16)

Come mostrato in figura 15, nel caso del contatto di pignone con cremagliera può essere descritto come il contatto di un cilindro con una superficie piana, ovvero con un cilindro con raggio infinito. La pressione di contatto viene quindi calcolata riarrangiando la Eq. (15).

La figura 16 mostra il caso del contatto del pignone MR con la cremagliera; anche in questo caso il contatto è rappresentato da un cilindro in contatto con una superficie piana.

In questo caso, la pressione di contatto p0 è calcolata considerando, per ogni punto appartenente al profilo attivo del dente, Fn,y e il raggio ρn dell’arco di cerchio a cui il punto appartiene.
Risultati
La procedura di TCA descritta è stata applicata al pignone MR mostrato in figura 2. Per brevità solo Fn, v2, vs e p0
sono riportati e discussi all’interno di questa sezione; i grafici di Fn, v2 e vs riportano anche la soluzione del caso ad evolvente, ottenuta usando sia le equazioni teoriche che l’approccio basato sul punto di contatto.

Analizzando l’andamento della forza normale Fn mostrato in figura 17, si può notare come il caso MR presenti una Fn il cui andamento non costante. Viceversa, come suggerito dalla Eq.(1), l’evolvente presenta una Fn costante. In ogni caso, tali oscillazioni sono contenute (∽= 2%). Lo stesso discorso può essere applicato sulle velocità. Infatti, come mostrato in figura 18, anche la v2 del MR oscilla intorno al valore teorico dell’evolvente.
La parte superiore di figura 19 riporta la pressione di contatto. Paragonando l’andamento di p0 dei due casi, possiamo apprezzare il principale vantaggio presentato dalla soluzione MR. Infatti la pressione di contatto massima presentata dal caso MR è all’incirca la metà di quella del caso ad evolvente. Infatti, come può essere osservato nella parte inferiore della figura 19, il caso MR ha, nella zona dove inizia il contatto, un raggio di contatto più elevato rispetto a quello del pignone ad evolvente. Questo implica una pressione di contatto più bassa e, conseguentemente, un miglioramento della durabilità dell’intero sistema. Dato che il raggio di contatto non varia in maniera continua, l’andamento d p0 per il caso MR ideale presenta un andamento discontinuo.

La figura 5, ottenuta all’interasse nominale e la figura 6, ottenuta ad un interasse casuale, sono state calcolate effettuando la TCA sul pignone di figura 2. Similmente, la figura 20 mostra come è una trasmissione di moto senza impatti possa avvenire solo all’interno di un certo intervallo di interassi. In altre parole, la figura 20 mostra che bisogna garantire un certo gioco radiale al fine di avere una opportuna trasmissione del moto. Nel caso MR analizzato, occorre mantenere un gioco radiale compreso tra 4% e 24% il modulo.

Una volta valutata la configurazione mostrata in figura 2, il passo successivo è quello di studiare l’effetto di ogni raggio. È stata quindi effettuata un’analisi di sensitività andando ad osservare il cambiamento di 3 principali parametri:
Il campo Δi di interassi ammissibili in cui l’ingranamento di pignone e cremagliera avviene senza collisioni. Infatti, per il tipo di applicazione in esame, l’aggiustamento dell’interasse è una procedura tipicamente effettuata [15].

L’uniformità della trasmissione del moto, la quale è rappresentata dal parametroΔEdt. Sono infatti le oscillazioni dell’EdT a causare un moto irregolare; una curva EdT non nulla ma costante implica semplicemente un ritardo (constante) tra il movimento del caso in esame e quello teorico.
La pressione di contatto massima durante l’ingranamento p0,max. In questo caso, la pressione di contatto che è presente sulla testa del dente non è stata considerata dato che il carico agente sulla testa del dente è mitigato dalla ripartizione di carico tra i denti.
| Tab. 2 – Effetto della variazione dei raggi | ||||
| ri | Δi | ΔEdt | p0,max | |
| r1 | ↗ | ≠ | ||
| ↘ | ↗ | ↗ | ↘ | |
| r2 | ↗ | = | ↗ | = |
| ↘ | = | ↗ | = | |
| r3 | ↗ | ↗ | ↗ | = |
| ↘ | ↘ | ↗ | = | |
| r4 | r4 = 0 | ≠ | ||
| ↗ | = | = | = | |
| ↘ | = | = | = | |
La tabella 2 riassume i risultati di diverse TCA, in cui ogni raggio costituente il profilo MR è stato cambiato, singolarmente e più volte, fino ad un massimo del 30% del suo valore nominare. Le condizioni per una transizione senza spigoli tra ogni arco di cerchio è stata mantenuta. Il simbolo ↘ significa una diminuzione; il simbolo ↗
un aumento; = una variazione nulla (o trascurabile); mentre ≠ indica soluzioni in cui, matematicamente, le curve TE non si intersecano. In altre parole, ≠ indica delle configurazioni di raggi che portano ad ingranamento con presenza di impatti.
L’analisi di sensitività ha evidenziato come ci siano delle configurazioni di raggi che presentano sempre degli impatti. Qui, queste configurazioni sono quelle in cui r1 è stato diminuito e il caso senza il raccordo di testa (r4 = 0). Inoltre, quest’ultimo caso suggerisce che un corretto ingranamento di pignone MR e cremagliera richiede la presenza del raccordo di testa. Infatti, la parte di Edt legata a r4 è quella che porta ad una diminuzione della curva (vedi figura 7), promuovendo la sovrapposizione delle curve e il conseguente ingranamento senza impatti.
Ulteriori considerazioni possono essere ottenute considerando il profilo MR come una approssimazione dell’evolvente. Infatti, il profilo MR discusso qui (figura 2) è stato ottenuto approssimando un fianco ad evolvente come una serie di archi, aggiungendo poi il raccordo di testa. Quindi, rispetto alle configurazioni studiate durante l’analisi di sensitività, tale profilo è quello più simile all’evolvente ideale (dove l’EdT è nullo). Infatti, il caso MR descritto in questo articolo (vedi figura 2) è la soluzione con ΔEdt più basso. Cambiandone i raggi, il profilo si allontana ulteriormente dall’evolvente, portando ad oscillazioni più ampie nella curva EdT (e quindi a un maggioreΔEdt). Nonostante ciò, cambiando i raggi è possibile ottimizzare altri parametri. Un aumento di r1 porta ad una diminuzione della pressione di contatto e un aumento di Δi, mentre una diminuzione di r3 ha effettivi positivi su Δi. Invece, r2 porta solo a peggiorare la curva EdT senza avere nessun effetto su Δi e su p0,max.
Conclusioni
Questo articolo presenta una procedura analitica di Tooth Contact Analysis (TCA), volta allo studio di sistemi pignone Multi Radiale (MR) e cremagliera, tipicamente adottato in applicazioni offshore. La procedura di TCA qui proposta, sviluppata considerando pignone e cremagliera ideali (indeformabili e senza errori di fabbricazione), assiste il progettista nella definizione preliminare di opportune configurazioni MR. Tali configurazioni, andrebbero poi studiate considerando anche la deformabilità del componente effettuando una Loaded Tooth Contact Analysis. La procedura di TCA è stata applicata ad un pignone MR reale.
La TCA è stata validata simulando il caso di un pignone ad evolvente, considerandolo come un pignone MR costituito da un numero infiniti di archi di cerchio. Per far questo, partendo dalle equazioni che descrivono l’ingranamento di due ruote dentante, sono state derivate le equazioni teoriche per il caso pignone cremagliera. Successivamente, i risultati della TCA e quelli teorici sono stati paragonati.
La TCA qui proposta permette, da un lato, di calcolare tutte quelle quantità di interesse durante l’ingranamento (forze, velocità e pressioni) mentre, dall’altro, permette di descrivere la cinematica dell’ingranamento.
Focalizzandoci su forze e velocità presenti sul fianco del dente MR, la TCA ha mostrato che le grandezze sono del tutto paragonabili a quelle presenti nel caso ad evolvente. L’unica eccezione è la pressione di contatto che, grazie all’adozione del profilo MR, viene ridotta in maniera significativa. Considerando invece l’ingranamento, è stato osservato come sia necessario definire opportunamente l’interasse di lavoro. Infatti, al fine di evitare impatti, occorre garantire sempre del gioco radiale (non nullo).
Successivamente è stata effettuata un’analisi di sensitività in cui sono stati analizzati diverse configurazioni di profilo MR. L’analisi ha evidenziato l’utilità dello strumento. Da un lato ci sono configurazioni che portano ad un ingranamento scorretto. Dall’altro, tramite la TCA è possibile definire, già nei primi step progettuali, quelle configurazioni di raggi che permettono l’ottimizzazione di numerosi aspetti, ad esempio la pressione di contatto.