Gli scienziati dell’Arizona State University stanno svilupppando dei muscoli bio-ispirati, che potrebbero trovare infinite applicazioni, tra cui agricoltura, industria, sanità e chirurgia, lavori domestici e di giardinaggio e, in un futuro non troppo lontano, l’esplorazione spaziale.
I ricercatori dell’Arizona State University stanno sviluppando dei muscoli ispirati alla natura, che potrebbero trovare infinte applicazioni, tra cui agricoltura, industria, sanità e chirurgia, lavori domestici e di giardinaggio e, in un futuro non troppo lontano, l’esplorazione spaziale. Grazie a questi muscoli bioispirati, i robot saranno in grado di operare in acqua bollente, sopravvivere a superfici abrasive e sollevare fino a cento volte il proprio peso. I nuovi campioni della robotica saranno più leggeri, più piccoli e indipendenti da una fonte di alimentazione: “In sostanza, abbiamo sviluppato un nuovo muscolo artificiale che imita i muscoli reali. Sebbene i muscoli bioispirati esistessero già, li abbiamo resi più versatili, più leggeri e più potenti” commenta Eric Weissman, dottorando presso il Robotic Actuators and Dynamics Lab dell’ASU
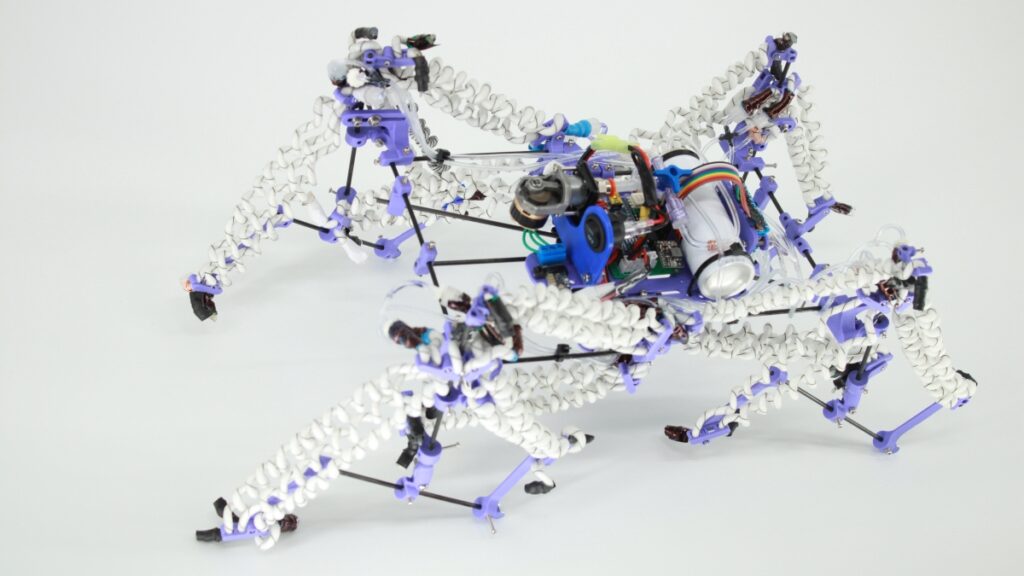
I robot quadrupedi odierni sono significativamente limitati nella mobilità perché solitamente sono basati su motori e tendono ad essere molto pesanti e meno flessibili. I ricercatori dell’ASU hanno introdotto gli attuatori HARP (Helical Anisotropically Reinforced Polymer), che imitano la contrazione e l’espansione muscolare naturale; sono flessibili, molto leggeri e silenziosi, ideali per l’utilizzo nella robotica morbida, e forniscono una forza muscolare in grado di sollevare carichi proporzionalmente molto maggiore rispetto alle controparti elettriche di pari peso: “Questi muscoli sembrano piccoli tubi avvolti a spirale come i cavatappi, una pasta cava, rigata e a forma di cavatappi. Quando li gonfiamo applicando un po’ d’aria, si espandono e si contraggono. Grazie alla loro versatilità e adattabilità, siamo stati in grado di ridurre significativamente la pressione necessaria, il che ci ha permesso di realizzare un robot in grado di camminare autonomamente senza alcuna alimentazione esterna, trasportando tutto il necessario.”
La ricerca dell’Arizona State University va oltre la progettazione di muscoli bioispirati per compiti specifici, sviluppando un sistema generale che consente di adattare la tecnologia a una serie di applicazioni a basso costo: “Nelle operazioni di soccorso in caso di calamità, i robot morbidi si muoveranno tra le macerie o gli edifici crollati per cercare i sopravvissuti, perché si possono infilare in spazi ristretti senza causare ulteriori danni. In casa, potrebbero aiutare in sicurezza gli anziani nelle attività quotidiane, come raggiungere oggetti sugli scaffali e assisterli in semplici faccende domestiche”.
Inoltre gli attuatori HARP possono sopportare temperature elevate, quindi si possono usare anche per compiti come i processi di risciacquo industriale o l’esplorazione marina e il recupero di campioni vicino alle sorgenti termali, dove l’acqua riscaldata dal magma viene rilasciata nell’oceano. La loro flessibilità e la capacità di ruotare e afferrare rendono questi robot adatti a usi agricoli e industriali.
Il braccio bionico da elefante
I ricercatori dell’Arizona State University stanno mettendo a punto un altro progetto, il “braccio bionico da elefante”, cioè un braccio robotico flessibile ispirato alla flessibilità e alla destrezza della proboscide di un elefante. Questo dispositivo permette al braccio di raggiungere oggetti sopra, sotto e intorno agli ostacoli con facilità, risultando particolarmente adatto per attività di ispezione e manipolazione in ambienti industriali. La sua struttura leggera e la sua intrinseca flessibilità riducono il rischio di danni alle apparecchiature e migliorano la sicurezza per i lavoratori nelle vicinanze, soprattutto in scenari che richiedono una stretta interazione uomo-robot: “In luoghi come impianti chimici o linee di produzione affollate, le apparecchiature sono spesso difficili da raggiungere e sensibili agli urti accidentali. Di conseguenza, anche semplici ispezioni potrebbero richiedere l’interruzione delle operazioni, con conseguenti tempi di inattività costosi e dispendiosi in termini di tempo” spiega Jiahe Wang, dottorando a capo del progetto.
Versioni più spesse potrebbero essere utilizzate nello spazio, aiutando gli astronauti nella manutenzione o porgendo loro gli strumenti. Poiché il robot è morbido e flessibile, è più sicuro da usare in prossimità di persone e attrezzature delicate, dove anche piccole collisioni possono causare problemi.
Foto: Eric Weismann/ASU