L’energia del moto ondoso rappresenta una delle fonti rinnovabili più promettenti grazie alla sua elevata densità energetica e alla sua disponibilità prevedibile rispetto all’energia eolica e solare. Nonostante il suo potenziale, lo sfruttamento tecnologico rimane difficile a causa delle condizioni marine difficili, degli elevati costi di installazione e manutenzione e dell’assenza di una tecnologia dominante. Questo lavoro presenta una revisione completa delle tecnologie di conversione dell’energia del moto ondoso e fornisce un’analisi cinematica e dinamica dettagliata di un nuovo sistema meccanico progettato per trasformare il moto lineare oscillatorio in un moto rotatorio unidirezionale continuo, adatto alla generazione di energia elettrica. Particolare attenzione è rivolta alla modellizzazione analitica del sistema, alla progettazione di un volano per la stabilizzazione dell’energia e alla valutazione delle prestazioni. I risultati evidenziano la fattibilità della configurazione proposta e i suoi potenziali vantaggi rispetto ai sistemi idraulici convenzionali.
Introduzione
Le fonti di energia rinnovabile sono fondamentali per ridurre la dipendenza dai combustibili fossili. Tra queste, l’energia delle onde marine si è affermata come una risorsa altamente promettente grazie alla sua elevata densità energetica e alla sua relativa prevedibilità rispetto all’energia solare ed eolica. Il contributo potenziale dell’energia delle onde alla domanda globale di elettricità è stato stimato in circa il 10%, il che rappresenta una risorsa significativa ancora non sfruttata.
A differenza dell’energia eolica e solare, la cui disponibilità è spesso intermittente e dipende dal sito di installazione, l’energia delle onde beneficia di un moto pressoché continuo che lo rendendo più affidabile ed ottimale per integrazione nelle reti elettriche. Tuttavia, nonostante decenni di ricerca e sviluppo, la tecnologia dell’energia delle onde rimane in gran parte pre-commerciale.
Gli ostacoli principali includono la durata dei materiali in ambienti marini difficili, i complessi requisiti ingegneristici, gli elevati costi di capitale e la mancanza di sistemi di conversione dell’energia standardizzati e maturi.
I convertitori di energia del moto ondoso (WEC) comprendono un’ampia varietà di configurazioni e principi di funzionamento. Ad oggi, nessuna tecnologia si è affermata come dominante, con oltre mille brevetti registrati in tutto il mondo. Questa diversità riflette la natura sperimentale del settore e la difficoltà di bilanciare la produzione di energia, l’efficienza dei costi, l’affidabilità e l’integrazione ambientale.
In questo lavoro viene presentato un nuovo sistema meccanico per la conversione del moto ondoso in moto rotatorio unidirezionale e quindi in energia elettrica. Il dispositivo è stato caratterizzato dal punto di vista cinematico e dinamico ed è stato ottimizzato il volano per regolarizzare il moto in uscita. In fine è stata valutate l’efficienza e confrontata con quella di un sistema equivalente idraulico.
Tecnologie di conversione dell’energia del moto ondoso
Le tecnologie di conversione dell’energia del moto ondoso possono essere classificate in base alla posizione di installazione, al principio fisico di funzionamento e al sistema di presa di forza (PTO).
In base alla posizione, si distinguono dispositivi onshore, integrati in strutture costiere come frangiflutti o muri portuali, caratterizzati da facile accessibilità e bassi costi di manutenzione ma con ridotta intensità energetica; vicino alla costa, installati a una distanza di 10–25 metri dalla riva, che offrono un buon compromesso tra efficienza e semplicità operativa; e offshore, situati in acque profonde, dove l’energia delle onde è massima, ma con maggiori difficoltà di installazione, ancoraggio e manutenzione.
Dal punto di vista del principio fisico, i dispositivi si dividono in tre categorie principali: le colonne d’acqua oscillanti (OWC), che sfruttano la compressione e decompressione dell’aria in una camera per azionare turbine bidirezionali, con un’efficienza del 40–55%; i sistemi a sfioro, che catturano le creste delle onde in serbatoi sopraelevati e rilasciano l’acqua immagazzinata attraverso turbine idrauliche, offrendo una produzione stabile ma con un’efficienza del 15–25%; e i corpi oscillanti, che convertono il movimento di strutture galleggianti o sommerse, raggiungendo efficienze superiori all’80% in condizioni controllate, ma con elevata complessità meccanica e problemi di resistenza in mare.
La classificazione in base al sistema di presa di forza (PTO) riguarda il metodo di trasformazione dell’energia meccanica in elettricità: i sistemi meccanici diretti, che utilizzano ingranaggi o generatori lineari, risultano semplici ed efficienti (80–90%) ma richiedono dispositivi di livellamento; i sistemi idraulici, diffusi nei dispositivi a corpo oscillante, impiegano fluidi in pressione e consentono una regolazione flessibile dell’energia ma con rendimento inferiore e maggiore complessità; infine, i sistemi pneumatici, tipici dei dispositivi OWC, sono semplici ma limitati dall’efficienza delle turbine (30-45%).
Numerosi prototipi hanno dimostrato la fattibilità dei Wave Energy Converters (WEC): tra questi, l’impianto LIMPET in Scozia, primo dispositivo commerciale collegato alla rete elettrica; l’OE-Buoy in Irlanda (2,5 MW); il Wave Dragon in Danimarca (4 MW), che combina energia ondosa ed eolica; il progetto OBREC nel porto di Napoli; gli assorbitori puntuali come Power Buoy e Archimedes Wave Swing; l’ISWEC del Politecnico di Torino, basato su un PTO giroscopico; l’attenuatore Pelamis testato in Portogallo; e i dispositivi di tipo Terminator come Stingray, Oyster ed Eco Wave Power.
Questi esempi evidenziano la varietà delle soluzioni tecnologiche sviluppate e, al contempo, le difficoltà ancora presenti nel passaggio dai prototipi agli impianti commerciali affidabili.
Descrizione del sistema meccanico proposto
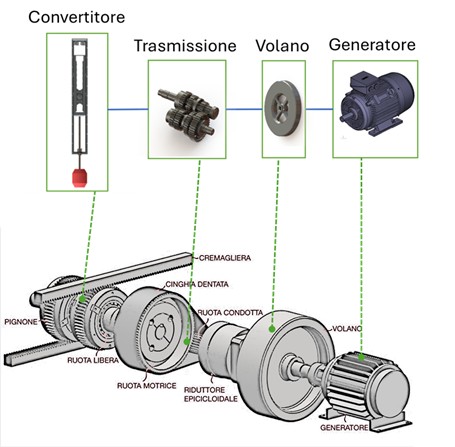
Il sistema meccanico studiato in questo lavoro è progettato per trasformare un movimento lineare oscillatorio, tipico delle onde oceaniche, in un movimento rotatorio unidirezionale continuo adatto ad azionare un alternatore (figura 1). Il dispositivo integra la conversione da lineare a rotatorio, tramite ruote libere, elementi di trasmissione e un volano di accumulo di energia per stabilizzare il moto in uscita.
Il sistema è composto da due cremagliere parallele, montate all’interno di un alloggiamento rigido che scorre orizzontalmente lungo quattro guide a ricircolo di sfere. L’alloggiamento è soggetto a una forza armonica esterna generata dalle onde del tipo:
F(t)= F0 ・sin (Ω ・t) (1)
dove è F0 la forza massima applicata e Ω ・t è la frequenza angolare corrispondente a un periodo d’onda di T=4 [s].
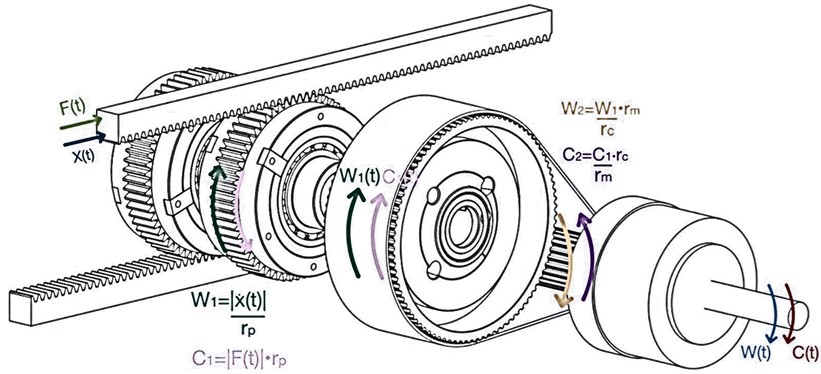
Le cremagliere si innestano con due pignoni, ciascuno dotato di un meccanismo a ruota libera, ed entrambi i pignoni sono montati coassialmente su un unico albero. Le ruote libere svolgono un ruolo di “raddrizzatore meccanico”: una si innesta quando l’alloggiamento si muove in una direzione, mentre l’altra si innesta quando il movimento si inverte. Ciò garantisce che l’albero di uscita ruoti sempre nella stessa direzione. L’albero primario è quindi collegato a un albero secondario tramite una trasmissione a cinghia dentata e un treno di ingranaggi epicicloidali che funge da moltiplicatore di velocità. Il rapporto di trasmissione della cinghia è 3,6, mentre l’ingranaggio planetario fornisce un rapporto aggiuntivo di 10, per un fattore di moltiplicazione totale di circa 36. Questa disposizione eleva la velocità di rotazione in uscita a valori adatti per un alternatore.
Per stabilizzare la velocità di rotazione e ridurre le oscillazioni indotte dall’ingresso alternato, un volano è accoppiato all’albero secondario. La sua progettazione si basa su criteri di equilibrio energetico e grado di irregolarità, garantendo la compatibilità con i requisiti dell’alternatore [20].
Analisi cinematica e dinamica
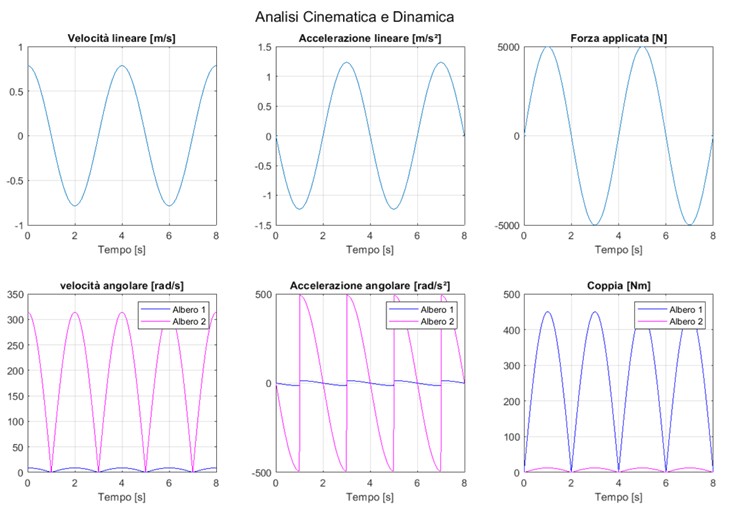
L’alloggiamento, e quindi le cremagliere, sono soggetti alla forza sinusoidale di ingresso dell’Eq. (1) e illustrate in figura 2. Trascurando in prima approssimazione gli effetti dinamici e l’attrito, lo spostamento x delle cremagliere può essere scritto come:
x(t)= A ・sin (Ω ・t) (2)
con ampiezza A=0,5 m nel caso studiato.
Velocità:

Accelerazione risulterà quindi:

Le cremagliere si innestano con pignoni di raggio primitivo rp = 90 mm. Pertanto, la velocità angolare e l’accelerazione angolare del primo albero sono:

La coppia corrispondente trasmessa all’albero 1 è:

Con un rapporto di trasmissione totale i=36, l’albero secondario ruota a:

mentre la coppia diventa:

La potenza meccanica massima all’albero secondario è quindi:
PmMAX = C2max ・w2MAX (11)
L’analisi rivela forti oscillazioni nella velocità angolare e nella coppia dovute alla forza di ingresso sinusoidale (figura 3). Senza un’ulteriore stabilizzazione, l’alternatore funzionerebbe in condizioni altamente irregolari, con conseguente inefficienza e possibili danni. Ciò giustifica l’introduzione di un volano, discusso nella sezione seguente, per regolarizzare lo scambio di energia cinetica e mantenere un’uniformità di rotazione accettabile.
Progettazione e ottimizzazione del volano
Gli alternatori richiedono una velocità di rotazione quasi costante per funzionare in modo efficiente. Per quantificare le fluttuazioni di velocità, viene definito il grado di irregolarità come:

Per gli alternatori il valore tipico per il grado di irregolarità deve essere inferiore a 1/300.
L’inerzia del sistema prima dell’inserimento del volano è data dalla somma delle inerzie della puleggia, dell’ingranaggio planetario e dei componenti di accoppiamento:
J = Jm +Jc +Jb + Jr (13)
dove Jm ,Jc ,Jb e Jr sono rispettivamente le inerzie della puleggia del motore, della puleggia condotta, della boccola conica e del riduttore.
L’inerzia totale richiesta per soddisfare il vincolo di irregolarità è ottenuta dall’equazione di bilancio energetico per i sistemi periodici:

dove Cm è la coppia motrice, Cr la coppia resistente e θ lo spostamento angolare.
La soluzione dà:

L’inerzia richiesta del volano è quindi:
Jflywheel = JTOT – J (16)
Considerando l’acciaio inossidabile con densità ρ=7800 kg/m3 e spessore h=100 mm, sono state valutate diverse configurazioni del volano:
- Disco pieno:

con raggio richiesto R≈0,26 [m], massa m≈168 kg.
- Cilindro cavo:

con rapporto tra raggio interno ed esterno . Ciò produce una massa leggermente ridotta a parità di inerzia.
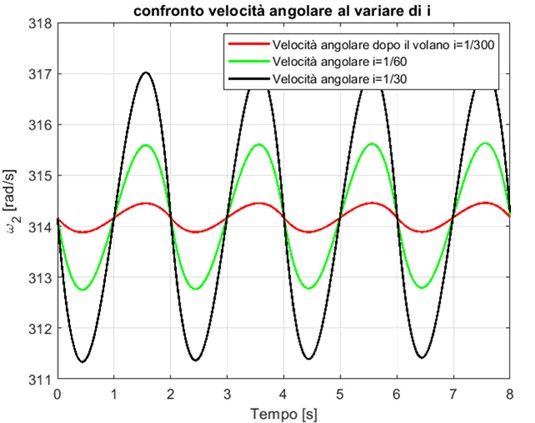
I progetti alternativi includevano strutture forate e alleggerite, consentendo compromessi tra massa, inerzia e producibilità. L’effetto del volano sulla regolarizzazione del moto è mostrato nella figura 4.
Analisi dell’efficienza
Efficienza del sistema meccanico
L’efficienza globale del sistema meccanico dipende dalle perdite di trasmissione e dalla stabilizzazione del volano. L’efficienza è definita come:
η = Pout/Pin (19)
dove Pout è la potenza meccanica fornita all’alternatore e Pin è la potenza indotta dall’onda in ingresso.
Per la configurazione studiata, l’efficienza è stata calcolata considerando le perdite di tutti i componenti, come segue:
Guide a ricircolo di sfere
Secondo il catalogo THK, il coefficiente di attrito per una guida SHS è: μ = 0,003. L’efficienza è calcolata come:
η = 1/(1+μ)
Poiché il sistema è composto da quattro carrelli, il valore viene elevato alla quarta potenza:
η = 0,988
Cremagliera e pignone
Per il set di ingranaggi a cremagliera e pignone, si ipotizza un’efficienza elevata: η = 0,99
Ruote libere
Il sistema include due ruote libere NFR, ciascuna composta da due cuscinetti 16014 (figura 1). Dai dati SKF si ottiene la perdita di potenza per ciascun cuscinetto e l’efficienza è espressa come:

Questo valore viene elevato alla quarta potenza: η = 0,999
La forza radiale viene calcolata con un angolo di pressione di α = 20°:
Fr = Ft ・tan α (21)
Perdita di potenza a ω₁ = 83,33 giri/min: Ploss = 0.22 W.
Cuscinetti UCP-208
Si fa un’ipotesi conservativa assegnando la forza radiale completa a ciascun cuscinetto.
Perdita di potenza: Ploss = 1,9 W; Efficienza: η = 0,999.
Cinghia dentata
Per la trasmissione a cinghia dentata, secondo il catalogo della società SIT, l’efficienza è stimata come: η = 0,98.
Riduttore epicicloidale
Dal catalogo del produttore, l’efficienza del riduttore planetario monostadio VRL 155 è: η = 0,95.
Cuscinetti UCP-207
Per i due cuscinetti UCP-207, a ω₂ = 3000 giri/min, la perdita di potenza è: Ploss = 51 W, per cui l’efficienza è pari a: η = 0,972.
Efficienza complessiva
L’efficienza meccanica totale si ottiene moltiplicando le efficienze di tutti gli elementi di trasmissione: ηTOT = 0,884.
Pertanto, la potenza meccanica in uscita risultante risulta: Pm = PmMAX ・ηm = 3471 W
Efficienza del sistema idraulico
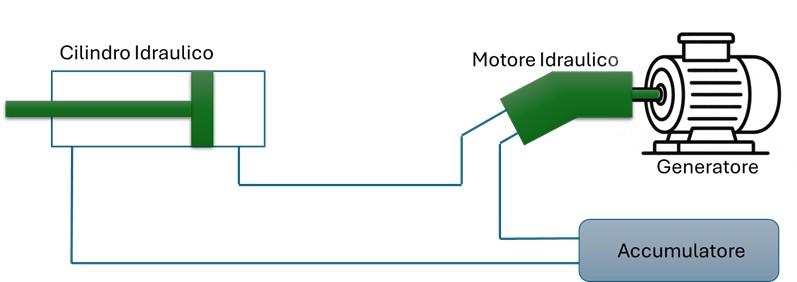
Per valutare i potenziali vantaggi, la soluzione meccanica proposta è stata confrontata con un sistema idraulico convenzionale di potenza equivalente (figura 5).
Le prese di forza idrauliche, sebbene ampiamente utilizzate nei WEC a corpo oscillante, presentano diverse criticità:
• Perdite di energia dovute all’attrito viscoso nelle pompe, nei tubi e nei motori idraulici.
• Necessità di circuiti ad alta pressione, accumulatori e valvole di controllo.
• Difficoltà di manutenzione dovute a perdite di fluido e usura dei componenti in ambiente marino.
Il sistema è costituito da una serie di galleggianti articolati ancorati a una struttura fissa. Questi galleggianti salgono e scendono seguendo il movimento delle onde, azionando così un circuito idraulico chiuso che comprende i seguenti elementi:
- pistone idraulico collegato meccanicamente al galleggiante;
- accumulatore idraulico che immagazzina energia sotto forma di pressione;
- motore idraulico azionato dal fluido pressurizzato;
- generatore elettrico accoppiato al motore, che converte l’energia meccanica in energia elettrica.
Lo spostamento verticale dei galleggianti aziona il pistone idraulico, generando pressione nel fluido. Questa energia viene temporaneamente immagazzinata nell’accumulatore e successivamente rilasciata in modo controllato per azionare il motore idraulico, che a sua volta alimenta il generatore.
Per consentire un confronto diretto con il nostro dispositivo meccanico precedentemente analizzato, si ipotizza che i seguenti parametri siano uguali per entrambi i sistemi:
- Potenza di uscita del motore idraulico uguale a quella del nostro dispositivo: Pout ≈ 3,5 kW.
- Corsa del pistone e periodo di oscillazione uguali a quelli del meccanismo a cremagliera del nostro dispositivo.
L’analisi dell’efficienza viene effettuata ricalcolando le perdite, partendo dal motore idraulico e procedendo a monte nel sistema. Secondo i dati del produttore (ad esempio, Bosch Rexroth A2FM e modelli simili), i motori idraulici a pistoni, comunemente impiegati in applicazioni marine e offshore per la loro robustezza ed efficienza, presentano caratteristiche tipiche:
- Potenza di uscita: 2-10 kW per unità,
- Pressione di esercizio: 100-250 bar,
- Efficienza complessiva: 0,85-0,90.
Ai fini del presente studio, si ipotizza una pressione di esercizio pari a: pin,motor = 210 bar, con un’efficienza del motore pari a: ηmotor = 0,86
tenendo conto delle prestazioni sia meccaniche sia volumetriche. La portata volumetrica corrispondente è di 115,5 l/min, stimando le perdite di pressione nel circuito totali pari a 225bar, si ottiene l’efficienza dell’accumulatore pari a:

Passando alla fase del pistone, la pressione in uscita è:

Ipotizzando un’efficienza del pistone pari a: , la pressione in ingresso richiesta è:

La potenza complessiva in ingresso al sistema è quindi:
Di conseguenza, l’efficienza totale è:
Confronto dell’efficienza tra sistemi meccanico e idraulico
La forza massima esercitata dal galleggiante sul pistone è:
Ne consegue che, per ottenere la stessa potenza in uscita del sistema meccanico, il sistema idraulico richiede una forza aggiuntiva di 1000 N, poiché il nostro dispositivo meccanico diretto funzionava solo con 5000 N. Inoltre, il circuito idraulico comporta perdite di potenza superiori a 1 kW, poiché solo 3,5 kW vengono erogati al motore dai 4,7 kW in ingresso al pistone. Al contrario, il dispositivo meccanico ha mostrato perdite inferiori a 0,5 kW.
Infine, se la forza massima disponibile a causa delle condizioni del mare fosse limitata a 5000 N (come inizialmente ipotizzato), entrambi i sistemi riceverebbero una potenza in ingresso di circa 4 kW. Tuttavia, il dispositivo idraulico fornirebbe solo circa 3 kW di potenza utilizzabile al generatore, mentre il sistema meccanico manterrebbe la potenza di uscita di 3,5 kW.
Conclusioni
In questo lavoro è stato presentato uno studio dettagliato di un nuovo sistema meccanico per la conversione dell’energia del moto ondoso, valutandone il comportamento cinematico e dinamico, ottimizzando il dimensionamento del volano e stimando l’efficienza. Dopo aver esaminato lo stato dell’arte dei convertitori di energia del moto ondoso (WEC), l’analisi si è concentrata su un meccanismo a pignone e cremagliera dotato di ruote libere per trasformare il movimento lineare bidirezionale in rotazione unidirezionale.
I risultati hanno dimostrato che:
- Il dispositivo è in grado di rettificare efficacemente il movimento oscillatorio, garantendo un’uscita rotativa continua.
- L’inclusione di un sistema di trasmissione e di un ingranaggio planetario aumenta la velocità di rotazione a livelli compatibili con gli alternatori commerciali.
- Il volano è essenziale per stabilizzare le irregolarità di rotazione, riducendo il grado di irregolarità al di sotto della soglia richiesta per una generazione elettrica efficiente.
- Il sistema raggiunge una potenza meccanica massima di circa 3,9 kW, con un’efficienza stimata dell’88%.
- Rispetto ai sistemi PTO idraulici, la configurazione meccanica offre una maggiore efficienza teorica, una minore complessità e una manutenzione più semplice, sebbene richieda un design robusto per resistere alle condizioni marine.
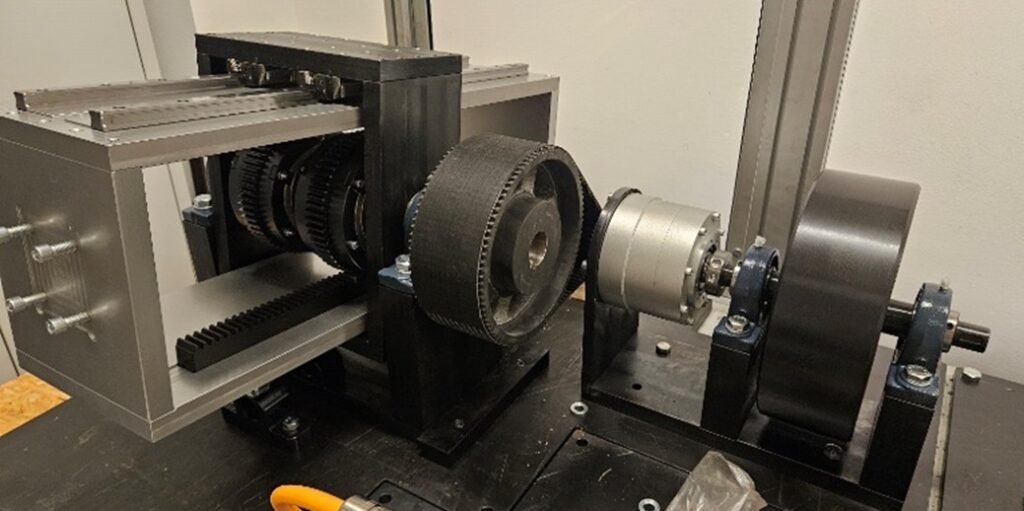
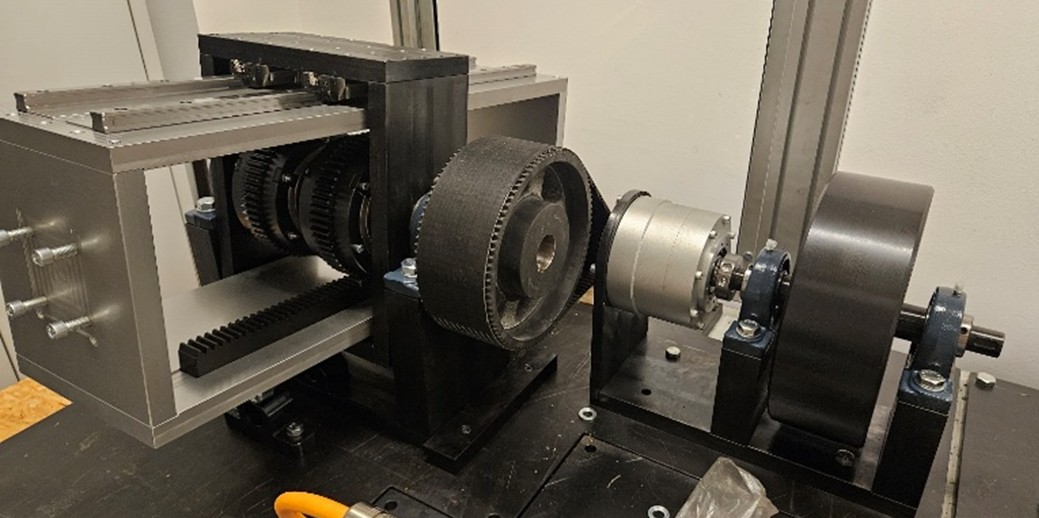
Da una prospettiva più ampia, questo studio evidenzia che, mentre le tecnologie di conversione dell’energia del moto ondoso sono ancora in fase di sviluppo, i sistemi PTO meccanici con volani integrati offrono una strada promettente verso uno sfruttamento economico e affidabile dell’energia oceanica. È stato realizzato un prototipo del dispositivo (figura 6), che verrà provato tramite un banco prova dedicato in modo da valutarne le prestazioni, l’efficienza e la resistenza ad usura e fatica.
Ringraziamenti
Questo articolo è realizzato nell’ambito del progetto NODES, finanziato dal MUR sui fondi M4C2 Investimento1.5 Avviso “Ecosistemi dell’Innovazione”, nell’ambito del PNRR finanziato dall’Unione europea Next Generation EU (Grant agreement Cod. N. ECS00000036). Si ringrazia Makita SpA per il supporto tecnico.