In questo studio vengono approfonditi due aspetti: l’ottimizzazione di una trasmissione monomarcia (riduzione a due stadi paralleli) per veicoli completamente elettrici e la progettazione e ottimizzazione della trasmissione per un veicolo ibrido.
La necessità di ridurre l’inquinamento atmosferico ha portato all’introduzione dei motori elettrici per la propulsione dei veicoli stradali. Senza dilungarsi in un’introduzione generale, è sufficiente constatare che la progettazione della trasmissione per questa nuova tipologia di veicoli richiede particolari attenzioni. Una trattazione esaustiva sull’argomento è disponibile in [1] In questo articolo verranno esaminati due casi affrontati dall’autore: l’ottimizzazione di una trasmissione monomarcia (riduzione a due stadi paralleli) per veicoli completamente elettrici e la progettazione e ottimizzazione della trasmissione per un veicolo ibrido. Gli argomenti affrontati nel primo caso sono propedeutici al secondo, che ha una complessità cinematica maggiore, perché basato su un epicicloidale composto. In particolare, verranno presentati il metodo di calcolo, i punti critici, i riferimenti bibliografici ed eventuali strumenti software. Maggiori informazioni su questo tipo di trasmissione sono in [2] e [3].
Trasmissione monomarcia con riduzione a due stadi ad assi paralleli
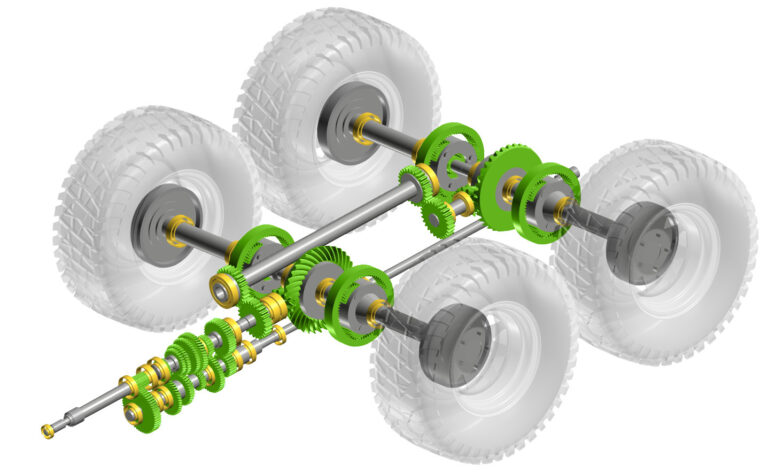
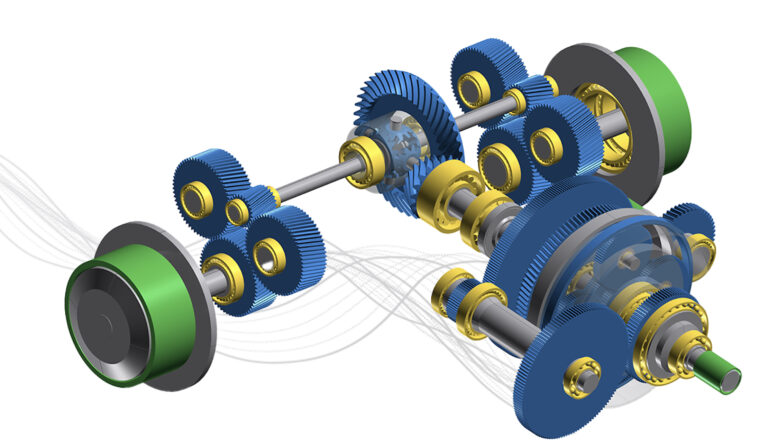
Sono stati esaminati due diverse configurazioni per applicazioni diverse, il primo più classico e semplice, il secondo più compatto, ma meno rigido (figura 1). Per entrambi i casi, è stato seguito lo stesso approccio descritto qui di seguito.
In entrambi i casi, erano già state proposte alcune configurazioni di macrogeometria (m, z, alfa, beta, altezza dente) ed era richiesto di ottimizzare la microgeometria, cioè il contatto. Per il primo caso, sono state studiate sette applicazioni (per altrettanti veicoli), mentre una sola per il secondo.


Ottimizzazione del contatto
Un processo di ottimizzazione parte dalla definizione di uno o più obiettivi, delle variabili con le quali “giocare” e dei vincoli da rispettare. Il contatto fra gli ingranaggi è un obiettivo non solo “visivo”; pertanto, per poter procede a un’ottimizzazione numerica, occorre esprimerlo in maniera analitica. È stato scelto di procedere su due strade parallele.
Bombatura lungo la fascia
L’effetto della bombatura può essere quantificato con le sicurezze a piede e fianco secondo ISO 6336 [4], purché si tenga conto dell’effettiva distribuzione del carico lungo la fascia. A tal proposito, è stato usato il metodo descritto nella ISO 6336-1 Annex E che tiene conto della microgeometria degli ingranaggi e della deformata degli alberi. Porta a risultati attendibili in tempi brevi e fornisce il valore del fattore KHβ. necessario per il calcolo della capacità di carico.

L’implementazione di questo metodo, che utilizza una LTCA monodimensionale, è descritta in [5]. SF e SH sono quindi l’obiettivo: verrà spiegato in seguito come sono state calcolate tali sicurezze con lo spettro di carico (figura 2).
Come variabili sono state scelte le due dimensioni che definiscono separatamente le due componenti di una bombatura asimmetrica, pensata come somma di bombatura simmetrica e correzione dell’elica. Come ulteriore variabile è stata aggiunto il tipo di correzione di elica: conica o parallela.
Spoglia di testa

Successivamente alla scelta della bombatura (asimmetrica) ottimale, si è cercata la spoglia di testa (del tipo arcuato) che minimizzasse l’errore di trasmissione PPTE e il picco di pressione di contatto. Poiché questi valori dipendono dal carico, è stato tracciato un grafico su diversi livelli di coppia, lasciando in parte all’occhio umano la scelta del valore di spoglia che porta al grafico “più bello” (figura 3).
Flessione alternata e spettro
Come anticipato, il primo problema affrontato è stato calcolare le sicurezze SF e SH con lo spettro di carico di tabella 1. La ISO 6336-5 spiega come calcolare il danno accumulato con la regola di Miner. È un metodo utilizzato diffusamente in ambito industriale, però è valido così com’è solo quando la ruota motrice è sempre la stessa e il fianco di lavoro non cambia. Nel caso in esame, invece, lo spettro presenta tutte le quattro combinazioni di segni su coppia e velocità, perché il motore elettrico funziona da motore o freno, in un senso di marcia e nell’altro. Occorre quindi tenerne conto sia nel calcolo a flessione (che non è né pulsante, né perfettamente alternata), sia nel calcolo a pitting, per il quale il numero di ore viste da ogni fianco non è lo stesso, né tantomeno uguale a quello usato per il calcolo a flessione. Ovviamente per ogni riga dello spettro va ricalcolato il fattore KHbeta funzione della bombatura e della deformata degli alberi.
Per il calcolo della resistenza a pitting, si eseguono due calcoli separati, uno per ogni fianco, ciascuno per il numero di ore effettivamente percorso su quel fianco, come risulta dallo spettro. La sicurezza a fianco è la minima delle due calcolate.
Per il calcolo della resistenza a flessione, il discorso è un po’ più complesso.
Le norme di calcolo sulla capacità di carico degli ingranaggi riportano i limiti di fatica dei materiali a flessione pulsante. Nel caso di flessione alternata pura AGMA 2001-D04 al paragrafo 16.2 indica di ridurlo al 70%.
Anche la ISO 6336-5:2016 riduce al 70% la resistenza per la flessione alternata pura. Negli altri casi, la ISO 6336-3:2006 Annex B indica di scalarla di un fattore YM funzione del rapporto di tensione (cioè dal rapporto fra i carichi nei due fianchi dello stesso dente), del materiale e dalla forma del raccordo al piede dente, nel caso di ingranaggi cementati.
Per maggiori informazioni: www.kisssoft.ag
Articolo tratto da una relazione presentata all’AGMA FTM 2018 e stampato con l’autorizzazione dell’American Gear Manufacturers Association, proprietaria dei diritti d’autore.
American Gear Manufacturers Association, 1001 N. Fairfax Street, 5th Floor, Alexandria, Virginia 22314. Le dichiarazioni e le opinioni espresse in questo testo sono quelle degli autori e non sono da considerarsi ufficiali dell’American Gear Manufacturers Association. Si ringrazia l’AGMA per la gentile autorizzazione alla pubblicazione (NdR).