

L’articolo presenta una procedura per la progettazione di un Motore Sincrono a Magneti Permanenti per scooter elettrico. La procedura proposta combina una fase di dimensionamento preliminare del motore con una fase di affinamento del progetto mediante un software agli Elementi Finiti. L’articolo presenta le scelte progettuali in grado di soddisfare i requisiti tipici per un veicolo elettrico.
Un motore sincrono a magneti permanenti per scooter elettrico
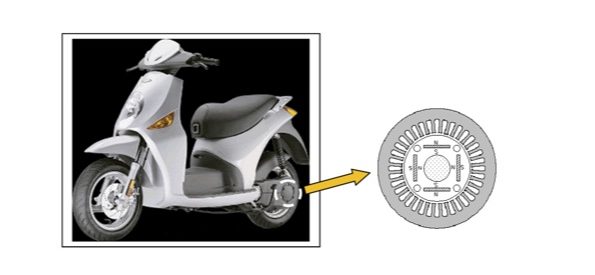
Il costo crescente del petrolio e l’impatto negativo del processo di combustione sull’ambiente hanno dato origine ad un interesse sempre maggiore dell’industria automobilistica e dei governi in tutto il mondo allo sviluppo di veicoli elettrici e ibridi: in questo contesto, gli scooter elettrici (figura 1) potrebbero giocare un ruolo significativo dal momento che negli anni passati hanno vissuto una crescita considerevole. La ricerca in questo campo consiste nel progettare azionamenti elettrici efficienti e compatti.
Il motore è il componente principale di un veicolo elettrico e le specifiche sono differenti da quelle convenzionali utilizzate nel settore industriale. I principali requisiti tipici sono i seguenti:
- elevati rapporti coppia/corrente e coppia/volume per ridurre al minimo il costo dell’inverter e le dimensioni complessive dell’azionamento;
- ampio range di velocità in deflussaggio, per ridurre al minimo la potenza nominale dell’azionamento nonostante un’ampia gamma di velocità;
- buona capacità di sovraccarico;
- elevata efficienza per aumentare l’autonomia del veicolo;
5) fabbricazione semplice per un prodotto finale conveniente.
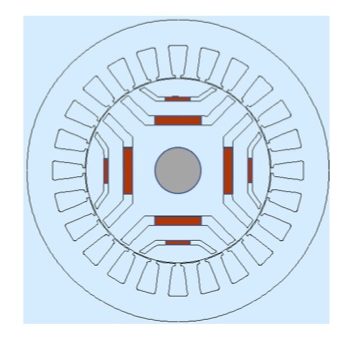
Nel campo della trazione elettrica è stato spesso utilizzato il motore asincrono grazie alla sua robustezza, basso costo e capacità di sovraccarico. Tuttavia, il controllo di questo motore è piuttosto complicato ed è difficile ridurre la sua dimensione per una data gamma di potenza. Il Motore Sincrono a Magneti Permanenti Interni (IPMM) può essere considerato una valida alternativa, grazie al costo decrescente dei Magneti Permanenti (MP) durante l’ultimo decennio: questo aspetto ha rappresentato una buona opportunità per la progettazione di un azionamento efficiente e compatto per veicoli elettrici. In figura 1 si riporta una tipica sezione del motore con MP “annegati”.
Questo motore richiede un controllo di velocità accurato mediante inverter: questo è cruciale per l’efficienza e il funzionamento del veicolo elettrico.
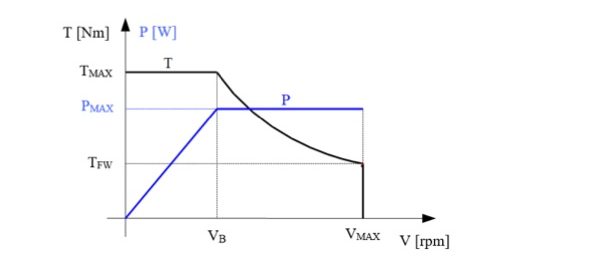
In questo articolo viene presentata una procedura di dimensionamento del motore IPMM in modo da garantire una adeguata caratteristica coppia-velocità, definita da zero alla velocità base (VB) nel funzionamento a “coppia costante” e dalla velocità base a quella massima (VMAX) nella regione a “potenza costante” (figura 2).
La procedura proposta combina una fase di dimensionamento preliminare del motore con una fase di affinamento del progetto mediante un software agli Elementi Finiti (FE). Può essere divisa in due fasi come segue.
1) Il primo passo prevede l’assegnazione delle specifiche del motore. Quindi, si passa al dimensionamento preliminare partendo da questi parametri ed imponendo i limiti termici e magnetici.
2) Attraverso un’analisi agli Elementi Finiti vengono calcolate le prestazioni del motore in tutto il range di velocità, con l’obiettivo di valutare ed affinare il progetto.
La progettazione riguarda uno scooter per 2 passeggeri, equivalente a uno scooter tradizionale da 100 cc., con le seguenti specifiche: peso dello scooter 140 kg, velocità nominale 30 km/h, velocità massima 70 km/h, pendenza massima della strada 20% ed un’autonomia alla velocità massima di circa 50 km.
Il valore dell’autonomia è riferito ad un funzionamento continuativo. In un ciclo urbano, c’è un forte uso di acceleratore e freno, e in questo caso possiamo ottenere una maggiore autonomia grazie alla frenata rigenerativa.
In questo contesto è stato progettato un motore sincrono a magneti permanenti annegati che consente di azionare, tramite un riduttore, la ruota posteriore. Il motore è alimentato da un inverter che è collegato alle batterie: una strategia di controllo adeguata consente di ottimizzare le prestazioni del motore in un’ampio range di velocità.
Progettazione del motore IPMM
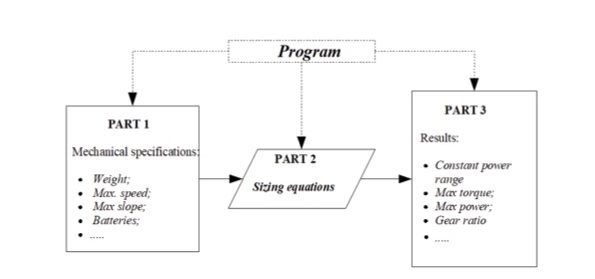
È stato messo a punto un software per calcolare i requisiti “elettromeccanici” (motore elettrico e batterie) dello scooter. La struttura del software è mostrata in figura 3.
Partendo dalle specifiche sopra elencate e utilizzando equazioni di dimensionamento appropriate, il programma calcola le prestazioni in termini di coppia, rapporto di trasmissione e taglia della batteria. In questa analisi, è stata imposta una tensione di 84 V ed una corrente di fase massima di 90 A.
Per questa applicazione specifica, il motore elettrico dovrebbe avere una potenza di circa 5 kW con una velocità base di 2600 rpm (corrispondente ad una velocità dello scooter di circa 30 km/h) e una velocità massima di 5800 rpm (corrispondente a 70 km/h). Questi risultati sono stati usati per l’affinamento del progetto.
La progettazione dell’IPMM è stata eseguita imponendo limiti termici e magnetici. Le dimensioni principali del motore vengono calcolate risolvendo un sistema di equazioni non-lineari. Dal sistema di equazioni, si possono ottenere il diametro del rotore, la lunghezza del pacco, il numero di giri, le dimensioni dei magneti permanenti e la lunghezza del traferro. È stato scelto un magnete in NdFeB in modo da ridurre il più possibile il peso del motore.
Attraverso una rete termica semplificata, è stata determinata la sovratemperatura dell’avvolgimento.
Per soddisfare i requisiti relativi alla potenza del motore e soprattutto aumentare il rapporto coppia-volume, è stata scelta una soluzione con due magneti permanenti per polo (figura 4). Il progetto finale presenta i seguenti dati: 4 poli, 36 cave, 120 mm lunghezza pacco, 130 mm diametro esterno statore, 80 mm diametro interno statore, 18 spire per fase. Il peso del motore è circa 11 kg.
Il motore è alimentato da un inverter con una strategia di “controllo vettoriale”. La coppia è data dalla seguente equazione in funzione delle correnti d’asse (Id, Iq):

Dove yPM è il flusso dei magneti permanenti, p le coppie di poli, Ld e Lq sono rispettivamente le induttanze degli assi d e q.
I comandi di corrente d-q sono quindi trasformati in correnti sinusoidali per le singole fasi dello statore, in funzione della posizione del rotore.
Attraverso un software basato sul Metodo a Elementi Finiti sono state calcolate le prestazioni del motore. È stato simulato un modello 2-D e nell’analisi si è tenuto conto della temperatura nei magneti. Inoltre, il modello ha permesso di analizzare le prestazioni del motore a diversi valori delle correnti d’asse d-q al variare della posizione del rotore.
Prestazioni del motore
Sono state effettuate diverse simulazioni agli Elementi Finiti con valori differenti di correnti asse (Id, Iq) che corrispondono a valori massimi di corrente di fase pari a 90 A. In tabella 1 sono mostrate le prestazioni con riferimento alla velocità base (vb) di 2600 rpm e velocità massima (vM) di 5800 rpm.
| vb = 2600 rpm – (Id=-63,64; Iq=63,64) | vM = 5800 rpm – (Id=-87,33; Iq=21,77) | |||
| Coppia Nm | 18,0 | Coppia Nm | 9,2 | |
| Potenza W | 4900 | Potenza W | 5590 | |
| Frequenza Hz | 87 | Frequenza Hz | 193 | |
| Efficienza % | 90 | Efficienza % | 91 | |
| Fattore di potenza | 0,89 | Fattore di potenza | 0,97 | |
| Velocità scooter km/h | 30 | Velocità scooter km/h | 69 |
Nel primo caso la coppia è 18 Nm e la potenza è circa 5 kW, con un rendimento del 90% ed un fattore di potenza di 0,89. Il range di velocità a potenza costante è circa 3 volte la velocità base: questo risultato conferma la bontà del progetto proposto.
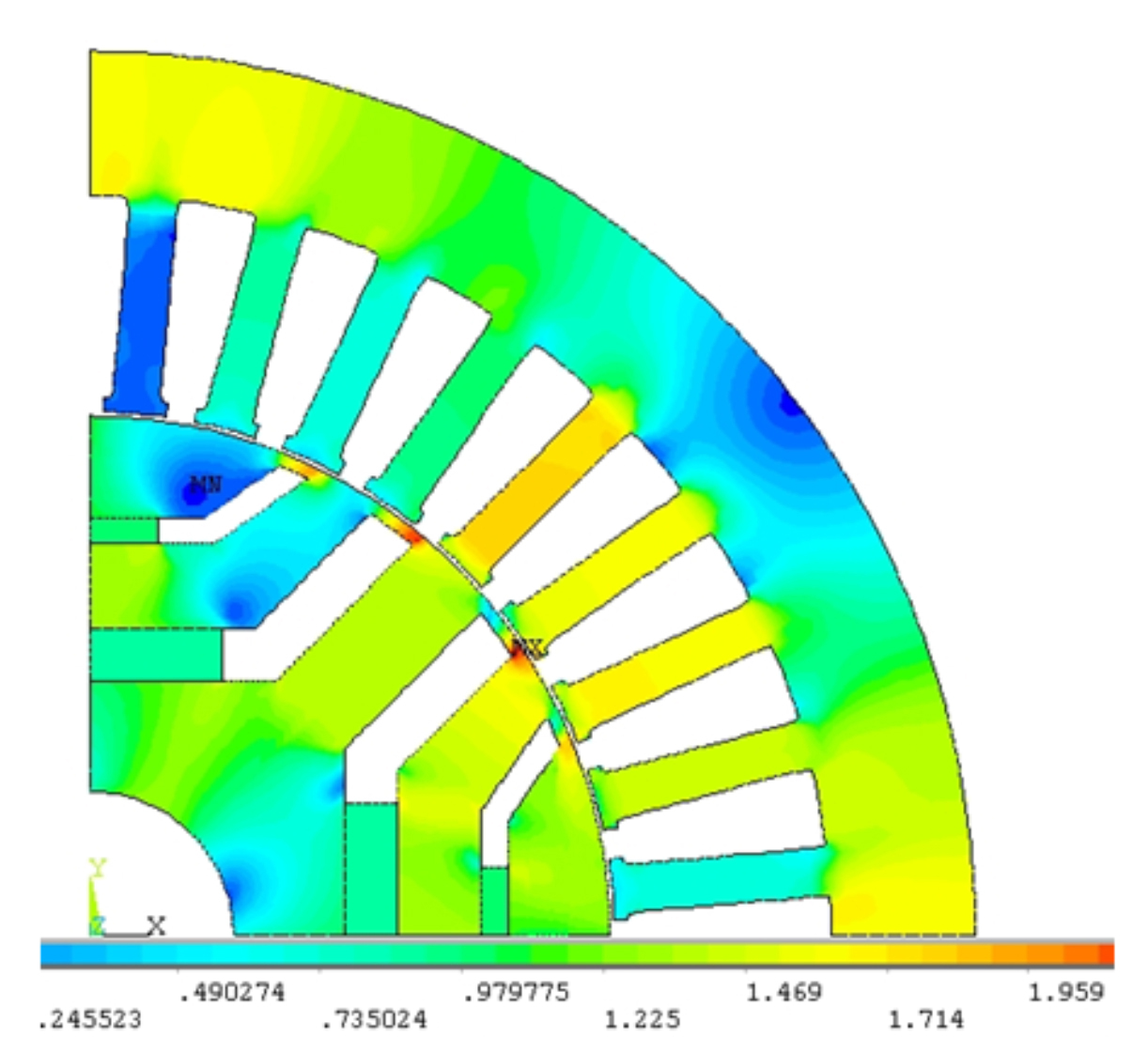
La densità di flusso è mostrata in figura 5 con riferimento a un polo della macchina. La densità di flusso massima nei denti e nella corona statorica non supera 1,7 T, mentre nel rotore è circa 1,5 T.
Le batterie sono state dimensionate considerando una tensione di 84 V ed una corrente massima di 90 A: sono stati scelti moduli in Nichel-Metallo Idruro (Ni-MH), generalmente utilizzati nei veicoli elettrici. Il peso totale delle batterie è di circa 35 kg.
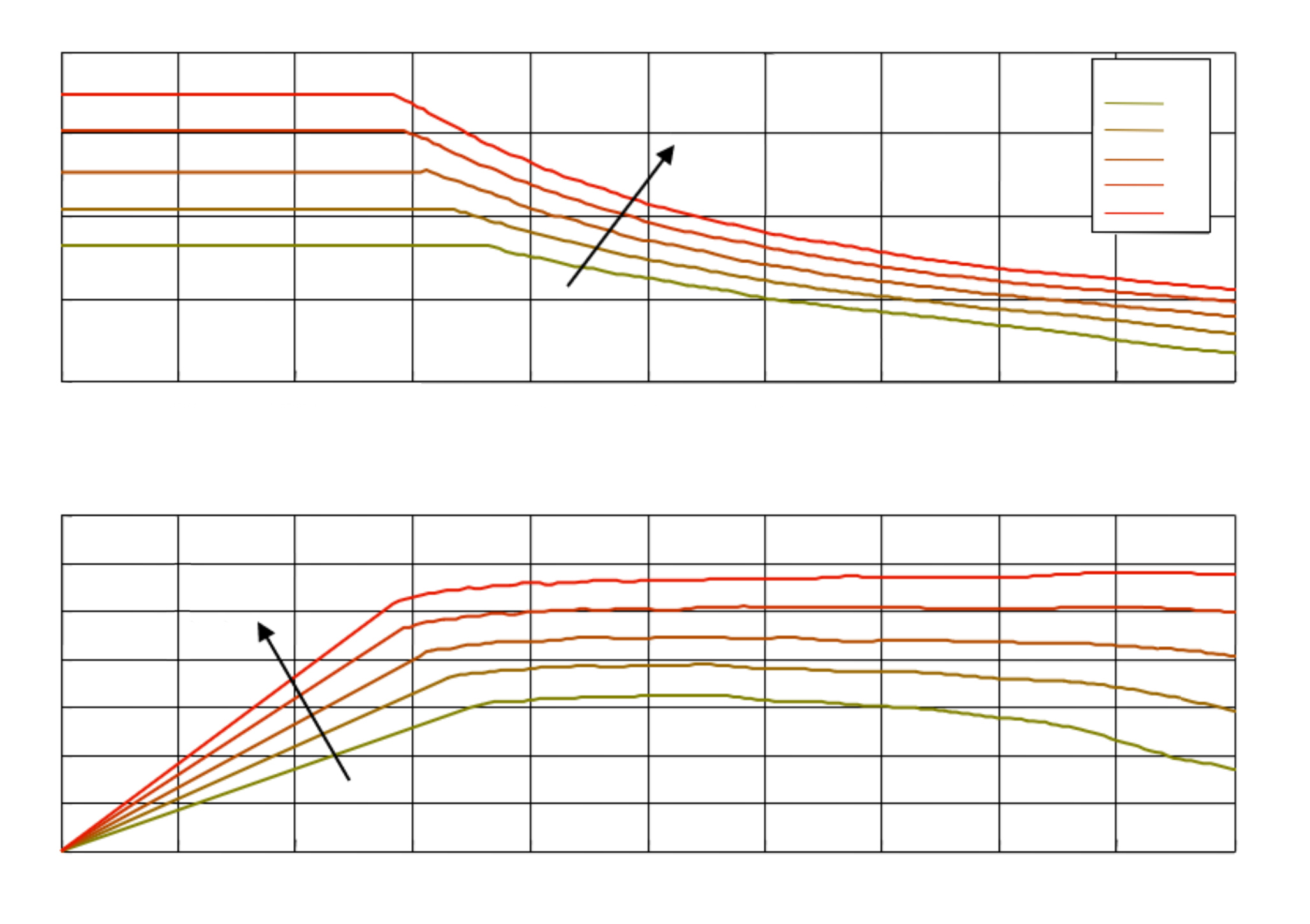
Le caratteristiche coppia-velocità e potenza-velocità dell’IPMM sono mostrate nella figura 6 per diversi valori di corrente.
Conclusioni
È stata presentata una procedura per il dimensionamento di un motore sincrono a magneti permanenti per uno scooter elettrico. La soluzione con magneti annegati può rappresentare una valida alternativa per i veicoli elettrici, rispetto ai motori asincroni tradizionali o ai motori a corrente continua, grazie alla sua bassa inerzia ed alto rapporto “potenza-peso”.
La procedura proposta, che prevede un dimensionamento preliminare ed un successivo affinamento del progetto mediante una analisi agli Elementi Finiti, ha permesso di progettare un motore IPMM da 5 kW fornendo dei buoni risultati in termini di rapporto coppia-volume ed efficienza, e può essere applicata per il dimensionamento di altre tipologie di motori elettrici. www.univaq.it



